E-mail Alert
E-mail Alert RSS
RSS-
摘要
针对传统轨距检测方法设备复杂、安装要求高和数据计算量大的问题,设计了一种基于轮轨相对横移的轨距检测系统。该系统首先使用两组激光源与相机组合分别采集左右两边轨头内侧激光光斑图像,然后根据钢轨边缘特点使用Hough检测与透视变换将其矫正为同一采集距离正视视角图像,接着对比基准时刻图像计算激光光斑中心点垂向位移变化量并通过其与轮对横向相对位移的几何关系分别计算两侧轮轨相对横移变化量,最后由两者差值得到相对初始时刻轨距变化量实现轨距的间接检测。实验结果表明,该轨距检测方法硬件结构简单,数据计算量小且检测精度较高,可实现轨距参数的非接触式检测。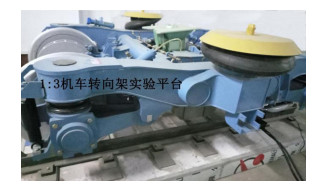
Abstract
Aiming at the complexity of the traditional gauge detection method, high requirements for the installation and large amount of data analysis, a gauge measurement method based on the relative transverse movement of wheel and rail is designed in this paper. Two sets of laser source and camera combinations are used to dynamically collect the image of the inner straight line part of the rail head in the method. According to the rail parameters, the Hough detection and perspective transformation are used to rectify the image from the same acquisition distance. Compared to datum moment, the variation of vertical displacement of the center point of the laser is computed. And through the geometrical relation of the variation previously described and the lateral relative displacements of the two wheels, the relative transverse displacement of the two wheels is calculated. The relative initial time gauge change is gained by the difference, which realizes the indirect measurement of the track gauge. The experimental results show that the method has the characteristics of simple hardware structure, small data calculation, high measurement precision, and can realize non-contact dynamic measurement of gauge parameters.
-
1. 引言
近年来各国学者对轨道轨距动态检测进行了深入研究。文献[6]开发了基于激光雷达的铁路轨道缺陷自动检测系统,应用在Hi-Rail轨检车上实现了轨道几何和轨道结构故障的自动检测和相关缺陷位置的准确定位,这种方法结构简单,检测精度高,但存在激光光束反射受车体位姿与振动影响大的问题。文献[7]采用二维激光扫描传感器建立了一种基于激光三角检测原理的轨距检测系统,通过采集左右钢轨断面轮廓并提取轨距特征点计算当前断面轨距值; 文献[8]提出了一种基于双目立体视觉技术的轨距检测方案,采用4台CCD摄像机和2个扇形光源构成检测系统,通过图像处理算法实现轨距检测。文献[7]和文献[8]都采用复杂的图像处理算法,检测方法的适用环境严重依赖于图像处理算法的鲁棒性。目前我国高速轨检车和综合检测车采用GJ-6型轨道检测系统[9],其应用激光摄像组件和惯性检测组件完成轨道工作边轮廓信息和空间位移信息采集,并应用数据处理组件实现信息实时处理分析。这种检测方法不仅能有效减小振动对轨距测量的影响,还能用于轨道状态检查,但轨检车价格昂贵,现有的轨道检测频率很难满足检测要求且存在设备维护困难的问题。因此本文提出了一种基于轮轨相对横移的轨距检测系统,该系统使用两组点光源与相机组合分别采集左右两侧钢轨轨头内侧直线部分的激光光斑图像,根据钢轨边缘特点使用Hough检测与透视变换[10]将其矫正为同采集距离的正视视角图像,减小了转向架位姿变化对图像目标尺度检测的影响。然后对比基准时刻图像计算检测时刻图像中激光光斑中心点的垂向位移并通过其与轮对横向相对位移的几何关系分别计算两侧轮轨相对横移变化量,由两者差值得到相对基准时刻的轨距变化量,实现轨距的检测。实验结果表明,该轨距检测系统减小了车体运行时位姿变化和振动对轨距检测的影响同时具有较高的检测精度,可实现轨距参数的非接触式检测。
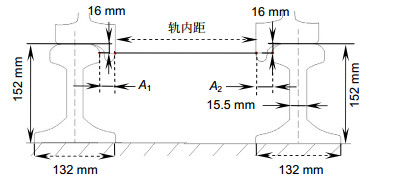
轨距作为最基本的轨道几何参数之一,是轨道检测中重要的检测内容。中国铁路总公司《铁路技术管理规程》规定轨道轨距定义为钢轨顶面下16 mm范围内两股钢轨工作边之间的最小距离,轨距检测部位在钢轨顶面下16 mm处(内侧),我国铁路交通的标准轨距为1435 mm[1]。轨道轨距的改变会引起列车各种振动使轮轨作用力发生变化,是轨道方面影响列车运行安全性和平稳性的控制因素,也是轨道结构部件损伤和失效的重要原因[2-5]。随着高速铁路运营速度的提升和运营规模的扩大,及时掌握轨距状态信息,已成为轨道交通安全工作中的一项重要事项。
2. 轨距检测系统设计
2.1 轨距检测原理
车辆运行过程中由于钢轨踏面磨耗、轨距和轨向不平顺,检测设备采集的图像会被由车体位姿和振动发生变化时产生的转向架横摆和摇头角影响,因而不同时刻采集的检测目标图像无法在同一尺度下直接进行计算。本文通过钢轨直线特征和透视矫正原理[10],将采集图像转换为同一采集距离的正视视角图像,然后进行特征点提取与位移计算。单侧轨道的单目视觉检测中,由于模型自身限制,摄像机光轴方向上的位移检测精度一般远低于垂直光轴方向度[11]; 同时,由于轮轨关系约束,车辆的垂向振幅远小于横向振幅,不同于文献[12-13]所述的通过激光光束水平照射检测点后反射到光电感应器检测轮轨横移变化量,本文利用轨头内侧激光光斑中心点相对基准时刻位置的垂向位移变化量与轨距检测点横向位移的几何关系,分别计算两侧轮轨相对横移变化量,通过左右轨轨距检测点相对横移变化量差值反映轨距变化量,从而提高轨距特征点横移量值的分辨率。
轨距不平顺会引起车辆运行过程中发生动态偏移,本文通过车辆动力学软件搭建车辆运行仿真模型,采用文献[14]中最大偏移量的计算方法,综合考虑多自由度影响后,求出不同速度集下车辆运行时各测量点的最大偏移范围。仿真结果表明,轨距不平顺时车辆一系减震器和转向架构架之间的偏移范围最小。因此本文检测系统采用的两组点激光源和相机组合通过刚性支架固定在转向架架构上,可以使检测系统尽量避免振动影响,同时最大程度地保证检测精度。
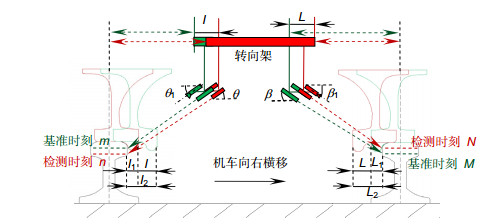
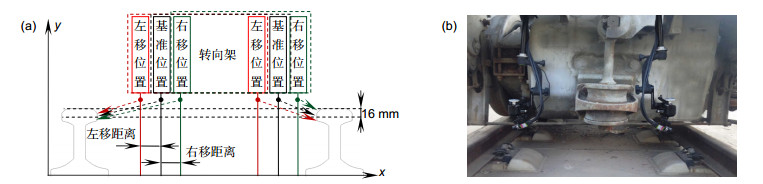
如图 1所示,列车运行过程中,目标检测间距A1与目标检测间距A2由于游离间隙存在处于不断变化中,两时刻变化量之和即对应时刻轨距变化量∆G(设车体向右横移为正)为$ \Delta G=\Delta A_{1}+\Delta A_{2}$。从而将检测时刻轨距转为基准时刻两侧轮轨相对横移变化量。
轨距(Gt)动态为轮内距(Ginn)与轮轨间距之和,即:
基准时刻摄像机镜头和激光源发射头轴线所在平面与钢轨走向保持垂直,且两个激光源焦点在垂直于钢轨走向的同一平面。设备与地面保持一定的高度和角度,以准确采集目标图像同时设备不受损害,如图 2所示,车辆运行仿真模型模拟出车辆运行速度200 km/h时的最大横摆范围为10 mm,分别调整两侧激光源发射头轴线与水平面夹角θ与β,使激光光斑始终在轨平面下轨头内侧轨距检测点直线区间浮动,此直线范围为工作边非磨耗圆弧范围。同时调整两侧相机镜头水平角θ1与β1,使激光光斑与钢轨始终在其图像中部移动。车辆运行过程中,激光发射器水平倾角θ与β和摄像机水平倾角θ1与β1固定,由于激光源和摄像机相对于转向架保持不动,故两侧采集设备相对于轨道检测位置横向移动与两侧轮轨相对横移保持一致,因此两个时刻对应的左右两侧检测位置激光光斑中心点垂向位移与其检测位置的轮轨相对位移数值相对应。当两侧轮对相对基准时刻产生横位l与L时,激光源和摄像机相对轨道分别移动l与L,同时激光光斑在轨道侧面上产生纵移(m点→n点,M点→N点)。激光光斑的中心点纵移与轮对横移存在几何关系,选取激光光斑中心点相较基准时刻在图片上纵坐标位置变化来计算两侧轮轨的横向位移值。经图像矫正后两个激光源焦点在垂直于钢轨走向的同一平面,则此刻两侧轮轨横向位移变化量的差值即为相对于初始时刻的轨距变化量,则车辆运行过程中轨距可动态表示为
2.2 轮轨相对横移的计算
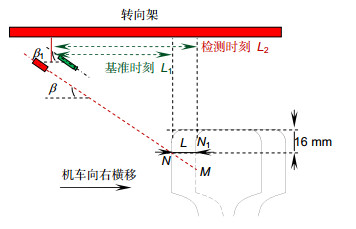
为了更直观的表现轨距检测点的水平移动(以图 2右侧装置为例),将基准时刻和检测时刻的检测设备位置变化与钢轨的实际位移变化表示为图中轨道相对检测设备的水平相对横移量,通过激光光斑中心点的移动建立对比基准时刻转向架与轨道相对横位的关系模型,如图 3。设摄像机镜头轴心与地面保持β1夹角,激光源发射器轴线与地面成β角,基准时刻固定支架与钢轨水平距离是L1,检测时刻固定支架向右移动L,此时固定支架与钢轨水平距离是L2,激光光斑中心点水平位移NN1是实际轮轨相对横移,其检测值为
其中:N1M1是NM的实际长度在图片上所映射的距离; NN11是NN1的实际长度在图片上所映射的距离; k是实际距离与图上距离之比。
3. 图像处理与轨距计算
轨距图像检测主要包含四个步骤:1)图像预处理; 2)图像透视矫正; 3)光斑中心点的计算; 4)轮轨相对横移和轨距的计算。具体流程如图 4所示。
3.1 图像预处理
![图 5 图像预处理。(a)处理前;(b)滤波后;(c)增强后]() 图 5
图 5图像预处理。(a)处理前;(b)滤波后;(c)增强后
Figure 5.Image preprocessing. (a) Before treatment; (b) After filtering; (c) After enhancement
当车辆实际运行时,采集图像不可避免地受到噪声、光照变化影响,图像清晰度不高、对比度低等问题。本文安装与激光光源相同波段的滤光片,滤除大部分噪声和强光干扰,使用自适应中值滤波器以3×3的矩形窗口对图像滤波,实验采集图像像素为2560×2048,用窗内像素灰度值的中值代替窗中心点处的像素灰度值消除孤立点和短线段的干扰,较好地保存原始图像的细节和边缘。由于轨距检测点直线区间不与车轮直接接触,故激光光斑能完整汇聚在检测区域而不会出现反光现象。但在光照变化情况下可能会出现采集图像局部亮度过低或过高,造成激光光斑定位不准确。为了更好地突出采集图像中激光光斑的位置信息,本文使用局部非线性对比度增强方法[15]对滤波后的图像进行对比度增强处理,这种增强算法对光照变化具有极强的鲁棒性,可以有效解决光照变化问题,凸显出激光光斑的同时将不需要的背景噪声和非检测区域进行弱化,为图像矫正和激光光斑位置精准提取做好准备。经过图像预处理前后图像如图 5所示。
3.2 图像透视矫正
本文用Hough变换与透视变换相结合矫正方法[10]对采集图像进行透视畸变矫正。图 6(a)为基准时刻右侧采集设备与钢轨走向垂直状态下采集的标准轨距处正视视角图像,将其作为基准图像。首先结合钢轨轨头内侧下边与底边直线特性稳定突出的特点,利用改进的霍夫变换提取待矫正图像(图 6(b))中两最长直线即钢轨轨头内侧下底线与钢轨底边直线斜率k1、k2,得到两条直线与图像左右边界相交四个交点坐标(0,663)、(2560,734)、(0,1808)、(2560,1767),已知基准图像对应四个交点坐标(0,656)、(2560,656)、(0,1885)、(2560,1885),利用四组对应点坐标求解出透视变换矩阵各参数,最后应用透视变换矩阵对待矫正图像所有点进行坐标变换,得到与基准图像同一采集距离的正视图像图 6(d)。
车辆运行过程中由于轨距和方向不平顺造成转向架发生横摆和摇头[16-17],导致不同时刻图像采集装置与图像采集点的距离和方位都不同,采集的图像发生透视畸变无法对两时刻的激光光斑中心点的位置变化进行精确计算,因此需要对发生透视畸变的图像进行透视变换矫正。通过透视变换将采集图像转变为正视视角图像,由于不同的采集距离采集的正视图中检测目标尺度特征也不同,因此本文根据钢轨基准时刻两条平行特征直线四个顶点坐标与采集图像对应位置坐标计算透视变换矩阵参数,使用变换矩阵对采集图像进行透视变换,得到统一于基准时刻采集距离的正视视角图像。
![图 6 检测图像透视矫正。(a)基准图像;(b)霍夫直线检测;(c)特征直线提取;(d)矫正后检测图像]() 图 6
图 6检测图像透视矫正。(a)基准图像;(b)霍夫直线检测;(c)特征直线提取;(d)矫正后检测图像
Figure 6.Fluoroscopic correction of detected image.
(a) Reference image; (b) Hough line detection; (c) Feature line extraction; (d) Detected image after correction3.3 激光光斑中心点的计算
首先对矫正后图像基于灰度阈值分割粗定位,找到RGB图像中R通道亮度最大的像素点; 以该像素点为种子,区域生长法[18]搜寻整片激光区域的像素位置; 通过灰度重心法[19]实现激光光斑中心点精定位。如图 7,检测时刻图像激光光斑中心点坐标M(648,553),基准图像激光光斑中心点坐标中心N(701,598)。
![图 7 激光光斑中心点。]() 图 7
图 7激光光斑中心点。
(a)检测图像光斑中心;(b)基准图像光斑中心Figure 7.Laser spot center. (a) Spot center of detected image; (b) Spot center of reference image
3.4 轨距计算
本文利用轨头内侧激光光斑中心点相对基准时刻采集位置垂向位移的变化量与轨距检测点横向位移的几何关系计算两侧轮轨相对横移变化量,使用左右轨轨距检测点轮轨相对横移变化量差值反映轨距变化量,降低了振动对轮轨相对位移检测的干扰,提高了轨距特征点横移量值的分辨率。如图 7所示,矫正后检测时刻采集图像与基准时刻采集图像为同一采集距离的正视视角图像,其激光光斑中心点坐标分别为M(648,553)、N(701,598),由此可知垂向位移为45像素。基准时刻右侧图像1像素对应实际距离约为0.1131 mm(已知图像中两特征直线间距1229 pixels,实际距离为139 mm)。已知右侧激光源发射头轴线与水平面夹角β=30。可由式(4)解得右侧轮轨相对横向位移为8.815 mm。同理,左侧图像单个像素对应实际距离约为0.1062 mm,由上述方法可得左侧轮轨相对横向位移为8.570 mm,则轨距相对基准时刻标准轨距1435 mm变化量为(设车体向右横移为正)
此处计算将车辆横摆角等产生的轨距变化纳入轨距不确定性分析,由多次重复试验计算可得其总不确定度(P=0.95)[20]为0.10 mm,则检测点轨距为
4. 实验与误差分析
为了测试本文提出的轨距检测方法的检测精度,本文设计两组实验分别检验两侧轮轨相对横移在系统轨距检测和人工检测结果中的误差,完成系统精确性评价和误差分析。实验使用相机为JAI GO-5000C高速彩色工业相机,镜头为RICOH 25 mm F/1.4,采集图像像素为2560×2048,激光源为富喆650 nm/30 mW可调焦距激光器。
4.1 轮轨相对横移检测
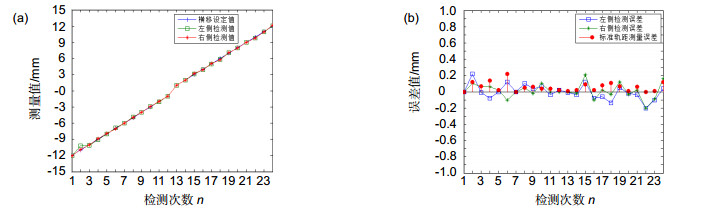
![图 9 轮轨相对横移误差图。(a)横移数据图;(b)误差分析图]() 图 9
图 9轮轨相对横移误差图。(a)横移数据图;(b)误差分析图
Figure 9.The relative error of traverse rail diagram. (a) Traverse data diagram; (b) Error analysis diagram
![图 8 轮轨相对横移实验图。(a)检测原理图;(b)设备安装图]() 图 8
图 8轮轨相对横移实验图。(a)检测原理图;(b)设备安装图
Figure 8.The relative sliding between wheel and rail. (a) Detection schematic diagram; (b) Equipment installation diagram
平均值 方差 标准差 A类不确定度(贝塞尔) 左侧横移检测误差 0.06617 0.00345 0.05878 0.01226 右侧横移检测误差 0.062917 0.00378 0.06147 0.01282 标准轨距检测误差 0.057417 0.00285 0.05336 0.01113 在1435 mm标准轨距线路上对装有检测设备的小车由基准位置左右横移指定距离(0~10 mm),横移间距为1 mm(以向右侧移动为正),利用检测时刻采集图像与基准时刻图像计算出转向架相对两侧钢轨位移量,由相对位移量与横移设定量对比得出检测设备轮轨横向位移检测误差范围,实验原理如图 8。检测结果如图 9,由图 9(a)可以看出,对于轨距左右两侧检测装置计算得到的横移量与实验设定值基本一致,由图 9(b)误差分析图可知单侧轮轨横移检测最大误差出现在第15组右侧横移检测,误差值为0.21 mm,两侧轮轨横移检测差值最大出现在第2组与第24组横移检测,误差值为0.12 mm。由表 1误差分析可知左侧与右侧横移误差均值均不大于0.07 mm,且通过方差、标准差、A类不确定度(贝塞尔)分析可知其数据分布较为集中,数据可靠度较高。因此,两端检测设备的定值轮轨相对横移检测精度很高,可以满足检测要求。
4.2 轨距检测
由表 2分析得知,轨道轨距检测系统所得轨距检测最大误差在1 mm之内,检测误差较小,能精确地检测出轨道轨距且满足文献[1]所规定的高速轨道+6 mm\-2 mm检测误差要求。同时在保证检测精度前提下,简易性与适用性较其他方法[7-9]有了一定提高。
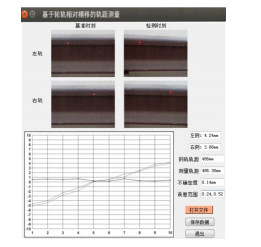
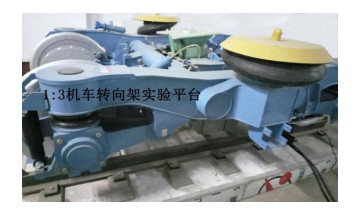
检测次数 设定轨距 检测均值 检测误差 总不确定度(ρ=0.95)[18] 误差范围 10 474 474.47 0.47 0.16 0.54~0.86 10 477 477.62 0.62 0.15 0.47~0.77 10 480 480.67 0.67 0.18 0.49~0.95 10 483 483.65 0.65 0.14 0.51~0.79 10 486 486.68 0.68 0.17 0.51~0.95 为了测试车体位姿与振动对轨距检测精度影响,本实验通过一个长4 m的1:3机车转向架测试平台模拟车辆运动进行动态轨距检测(如图 10所示)。设定钢轨轨距后以初始时刻机车转向架与钢轨走向平行时刻设备正视视角采集的激光点图像为基准图像,设定转向架运动速度为50 km/h的运行过程中, 每间隔1 s触发相机采集检测图像进行轨距计算。设计检测系统软件如图 11所示,通过使用轨距尺人工设定的数值与轨距检测设备采集数据进行数据分析,并改变轨距进行多次重复试验。本实验的轨距检测误差为检测数据与实际数据之差,由于两侧检测数据是图像中的像素值,转为实际距离时需要先计算图像采集时图像距离与实际距离的比例关系。由左右两侧基准图像特征直线间距与像素点数可得左侧图像1像素对应实际距离约为0.092 mm,右侧图像1像素对应实际距离约是0.093 mm。经过软件测试分析,轨道轨距检测系统检测误差如表 2所示。
5. 结论
本文设计了一种基于轮轨相对横移的轨距检测方法,使用两组激光源与相机组合分别动态采集轨头内侧直线部分点激光的图像,根据钢轨参数使用Hough检测与透视变换将其矫正为同一采集距离正视视角图像,对比基准时刻图像计算激光光斑中心点垂向位移变化量并通过其与轮对横向相对位移的几何关系分别计算两侧轮轨相对横移变化量,由两者差值得到相对初始时刻轨距变化量,从而实现轨道轨距的间接检测。多组实验证明本文方法可以准确检测轨距信息,用于指导轨道交通线路维护。与现有方法相比,设备结构简单,便于车辆安装,采集数据计算量小,检测速度快,可以实现实时检测。
-
参考文献
中国铁路总公司.铁路技术管理规程[R].北京: 中国铁路总公司, 2014: 12-13.
China Railway Corporation. Regulations on railway technical management[R]. Beijing: China Railway Corporation, 2014: 12-13.
冯青松, 雷晓燕, 练松良.不平顺条件下高速铁路轨道振动的解析研究[J].振动工程学报, 2008, 21(6): 559-564.
DOI: 10.3969/j.issn.1004-4523.2008.06.005Feng Q S, Lei X Y, Lian S L. Vibration analysis of high-speed railway tracks with geometric irregularities[J]. Journal of Vibration Engineering, 2008, 21(6): 559-564.
DOI: 10.3969/j.issn.1004-4523.2008.06.005Lei Y, Tian X Y, Qi F L, et al. Vertical track irregularity influence on the wheel high-frequency vibration in wheel-rail system[J]. Mathematical Problems in Engineering, 2016, 2016: 5082319.
http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Doaj000004702322罗世辉.轨距对机车车辆稳定性影响的研究[J].中国铁道科学, 2010, 31(2): 56-60.
http://d.old.wanfangdata.com.cn/Periodical/zgtdkx201002011Luo S H. Study on the influence of the track gauge on vehicle yaw stability[J]. China Railway Science, 2010, 31(2): 56-60.
http://d.old.wanfangdata.com.cn/Periodical/zgtdkx201002011展开 -
期刊类型引用(0)
其他类型引用(7)
-
版权信息
版权属于中国科学院光电技术研究所,但文章内容可以在本网站免费下载,以及免费用于学习和科研工作 -
关于本文
引用本文
Citation:张光跃, 马增强, 苑佳靖, 康德, 闫德立, 李俊峰. 基于轮轨相对横移的轨距检测方法研究[J]. 光电工程, 2020, 47(2): 190252. DOI: 10.12086/oee.2020.190252Citation:Zhang Guangyue, Ma Zengqiang, Yuan Jiajing, Kang De, Yan Deli, Li Junfeng. Track gauge measurement based on wheel-rail lateral relative displacement. Opto-Electronic Engineering 47, 190252 (2020). DOI: 10.12086/oee.2020.190252导出引用出版历程
- 收稿日期 2019-05-15
- 修回日期 2019-10-10
- 刊出日期 2020-01-31
文章计量
访问数(8569) PDF下载数(2642)
- 8569 访问数
- 2642 下载数
- 7 引用数
 下载:
下载: