E-mail Alert
E-mail Alert RSS
RSS-
摘要
如何增强光学载荷与运动平台间的主动隔振能力一直是光电跟踪系统面临的难题。提出一种双观测器方法实现惯性稳定平台中的宽频扰动抑制。双观测器方法包含两方面:其一,经典误差观测器通过低通滤波器的设计而具有较强的低频抑制能力;其二,饱和加速度扰动观测器根据自身稳定性条件调整饱和阈值与滤波器带宽,改善其扰动抑制特性并完成对中高频扰动的抑制。双观测器综合了二者的优势,同时分析了两种观测器间的相互作用以更好地参数化。所提方法在惯性稳定装置中进行了闭环验证,实验结果表明,双观测器可在单频及混频扰动下提升系统闭环性能。
Abstract
Increasing the active vibration isolation capability between the optical payload and the motion platform has always been a challenge for optoelectronic tracking systems. Therefore, a dual observer method is proposed to achieve wide-band disturbance rejection for an inertially stabilized platform. The dual observer method consists of two aspects. Firstly, a classical error observer has a strong low-frequency suppression ability through the design of a low-pass filter. Secondly, a saturated acceleration disturbance observer improves its disturbance suppression characteristics and completes the rejection of medium and high-frequency disturbances by adjusting the saturation threshold and filter bandwidth according to its stability conditions. The dual observer combines both advantages, and the interaction between the two observers is analyzed for better parameterization. Closed-loop verification of the proposal is carried out using the inertial stabilization device. The experimental results show that the dual observer can improve the closed-loop performance under both single-frequency and mixed-frequency disturbances.
-
1. 引 言
如今光电跟踪系统已由地基向运动平台发展,例如车载、船载、星载等。由于运动平台的扰动复杂多样,克服载体及环境引起的视轴晃动是实现高精度稳定跟踪的重要工作。惯性稳定平台 (ISP)是一个由双轴或三轴万向架和惯性传感器集成的机电系统,使光学载荷的视线免受来自运动平台及外界的干扰[1-2]。因此惯性稳定平台的主动隔振能力直接影响着光电跟踪系统的稳定与跟踪性能[3]。针对提高惯性稳定平台隔振能力的研究,可分为以下两方面:
1)改进硬件结构。文献[4]与文献[5]采用主动磁力轴承代替机械轴承,解决了机械轴承存在的摩擦限制带宽的问题。2)优化控制结构/算法,这分为间接稳定和直接稳定两种形式。间接稳定主要是采用惯性传感器的捷联安装实现扰动前馈[6]。前馈控制在不改变系统特性前提下可完全消除干扰的影响。然而前馈方法无法获取万向架自身运动状态且依赖额外传感器测量。直接稳定是指惯性传感器直接测量万向架相对于惯性空间的角速度或加速度,并将这些信息反馈至系统,以反馈闭环的形式实现ISP在惯性空间的稳定[3]。直接稳定与一些补偿算法的结合可增强ISP控制性能。基于模型的摩擦补偿是高精度控制系统中的重要过程,其关键在于选择合适的摩擦模型与识别参数[7-8]。文献[9]提出一种扩张状态观测器与PID结合的复合控制方法,将内外部扰动视为总扰动并观测出来。文献[10]采用神经网络与PID组成自适应控制器以寻得最优控制参数。文献[11]在多闭环的位置环采用全局快速终端滑模控制器实现多源扰动抑制。然而上述直接稳定相关方法存在参数较多、实时性差、需要假设条件等缺点。
误差观测器,思想在于将扰动抑制能力转化为基于误差观测的灵敏度函数优化设计,而且不需要额外的传感器[12]。其特点为误差观测器是基于扰动影响后的误差而不是基于扰动作用后的系统输出,因为在诸如望远镜等控制系统中,扰动信息不能直接通过系统输出测量[12]。由于ISP高频建模非准确性,灵敏度函数仅通过带宽有限的低通滤波器完成,所以误差观测器可抑制低频扰动,而抑制范围非常有限。与此同时,Wu等[13]和Fang等[14]将研究者提出的扰动观测器 (DOB)作为一种主动抗扰方法,以其估计/抵消特性,能够在影响产生前显著降低干扰的作用。同样由于模型高频未建模动力学及小增益定理,常规扰动观测器的能力仍受限于低带宽的低通滤波器。目前改善DOB性能的手段包括优化参数选择、改变DOB结构及在观测器中增加新元件[15-18]。综上,本文提出一种双观测器方法,该方法包含两部分结构。首先在单速度环内部应用误差观测器。其次由于加速度计的高带宽和高灵敏度,能够快速捕捉系统状态,所以在闭环条件下采用加速度计测量系统输出并构成加速度扰动观测器,而且这样设计避免了速度信号的耦合。我们注意到文献[18]与文献[19]均在观测器中应用饱和函数限制控制输入或扰动估计以避免峰值效应的产生。文献[20]围绕饱和函数设计了一种非线性低通滤波器以改善相位延迟与滤波能力。所以我们在DOB中加入饱和函数限制观测器输出,饱和函数是一仅改变幅度大小不改变相位的非线性模块。饱和函数与低通滤波器形成二自由度滤波器,与传统DOB相比,这打破了建模准确性的依赖并改善了DOB扰动抑制能力。双观测器综合误差观测器与饱和加速度扰动观测器二者的优点,实现ISP的宽频扰动抑制。
本文其余结构如下:第二节简要介绍ISP并点出误差观测器的不足;第三节分析饱和加速度扰动观测器;第四节提出双观测器并详细分析内部特性;第五节通过对比实验证明双观测器的有效性;第六节对本文进行总结。
2. 误差观测器
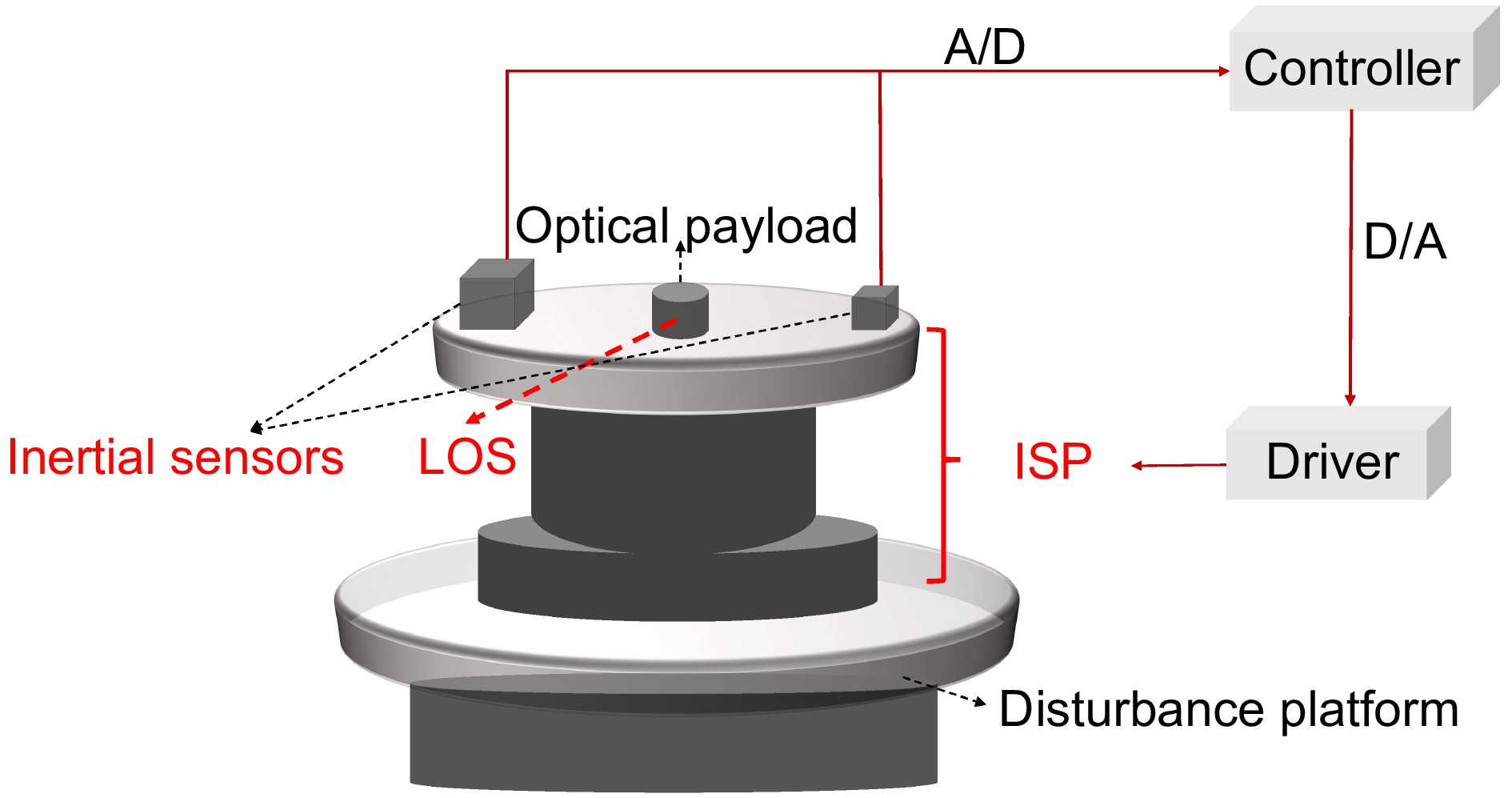
图1为惯性稳定平台工作原理图,一般地由四部分组成:万向架、惯性传感器、控制器和驱动器。万向架在实际应用中为双轴或三轴,可多自由度转动。传感器为陀螺或加速度计或位置传感器,提供万向架的角运动。控制器执行控制程序,驱动器驱动电机控制万向架运动。当惯性稳定平台受到外部扰动时,控制器通过获取传感器信息并执行算法控制光学载荷的视线。
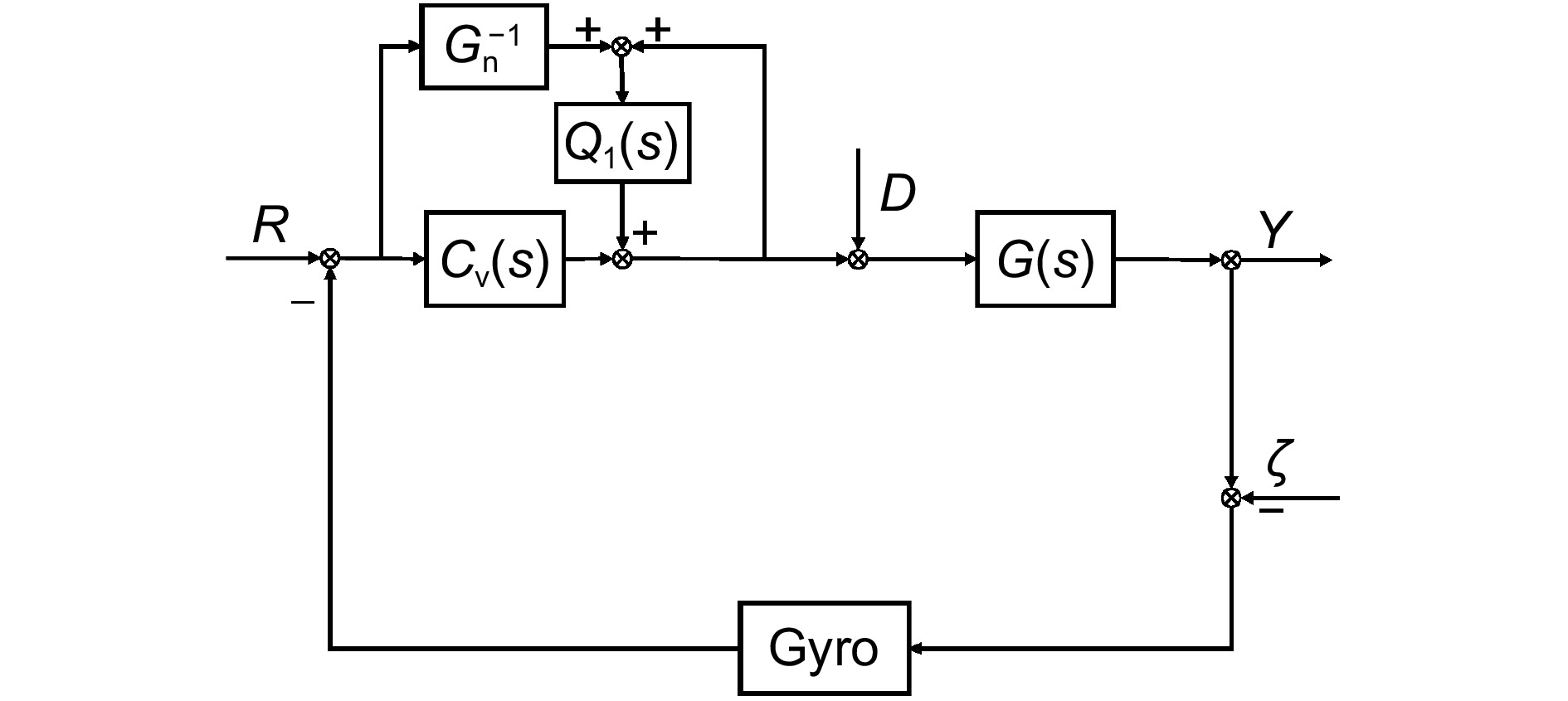
图2为误差观测器结构框图,其中R、D、Y、ζ分别表示系统输入、受到的干扰、系统输出、噪声,Cv(s)是Proportional-Integral (PI)控制器,G(s)为平台速度特性,Gn为平台标称模型,Q1为低通滤波器。
图2结构的特征方程E1(s)为
E1(s)=1+CvG+Q1G−1nG−Q1=(1+CvG)(1+Q1G−1nG−Q11+CvG). 单环中1+CvG是稳定的,所以仅考虑1+Q1G−1nG−Q11+CvG即可。根据小增益定理,下列条件需满足:
‖ 则{\left\| {{Q_1}} \right\|_\infty } < {\left\| {\dfrac{{1 + {C_{\mathrm{v}}}G}}{{G_{\mathrm{n}}^{ - 1}G - 1}}} \right\|_\infty }。随着频率增加,1 + {C_{\mathrm{v}}}G幅值特性从无穷大收敛至1,所以有{\left\| {{Q_1}} \right\|_\infty } < {\left\| {\dfrac{1}{{G_{\mathrm{n}}^{ - 1}G - 1}}} \right\|_\infty }。可以注意到当{G_{\mathrm{n}}} \approx G(G_{\mathrm{n}}^{ - 1}G \approx 1)也就是在精确建模频率范围内时,式(2)成立。因此图2稳定的充分条件是BW({Q_1}) < {L_{({G_{\mathrm{n}}} \approx G)}} (BW为带宽缩写,L为模型精确建模的最大频率,下同)。
扰动抑制函数S(s) = \dfrac{{G(1 - {Q_1})}}{{{E_1}(s)}},所以当| 1 - {Q_1} | \to 0,也就是{Q_1}带宽较高时,该结构扰动抑制性能越强。然而稳定性分析为{Q_1}设置了上界,因此误差观测器仅对低频扰动具有抑制作用。
3. 饱和观测器
3.1 加速度扰动观测器
由于误差观测器的特性,使系统抑制带宽非常有限,理论上寻求一种增强系统中高频扰动抑制能力的方法并将二者融合起来是可行的。图3为加速度扰动观测器(ADOB)结构,其中ur、δ和u分别表示控制器输出、观测器输出及控制量,{G_{\mathrm{a}}}(s)和{G_{{\mathrm{an}}}}表示加速度对象和加速度对象标称模型,{Q_2}(s)是低通滤波器。
这里用加速度对象具有两方面原因:其一,加速度计具有高灵敏度和高检测带宽的优点,能够反映系统内部力矩的变化;其二,加速度对象模型的中高频偏差小于速度对象模型,利于提升系统的中高频扰动抑制作用。然而此结构属于线性观测器,仍采用低通滤波器缓解由模型高频不准确性引起的不稳定。根据小增益定理可知,低通滤波器带宽需小于可获取精确模型所对应的频率,所以此观测器带宽也是有限的。
3.2 饱和加速度扰动观测器
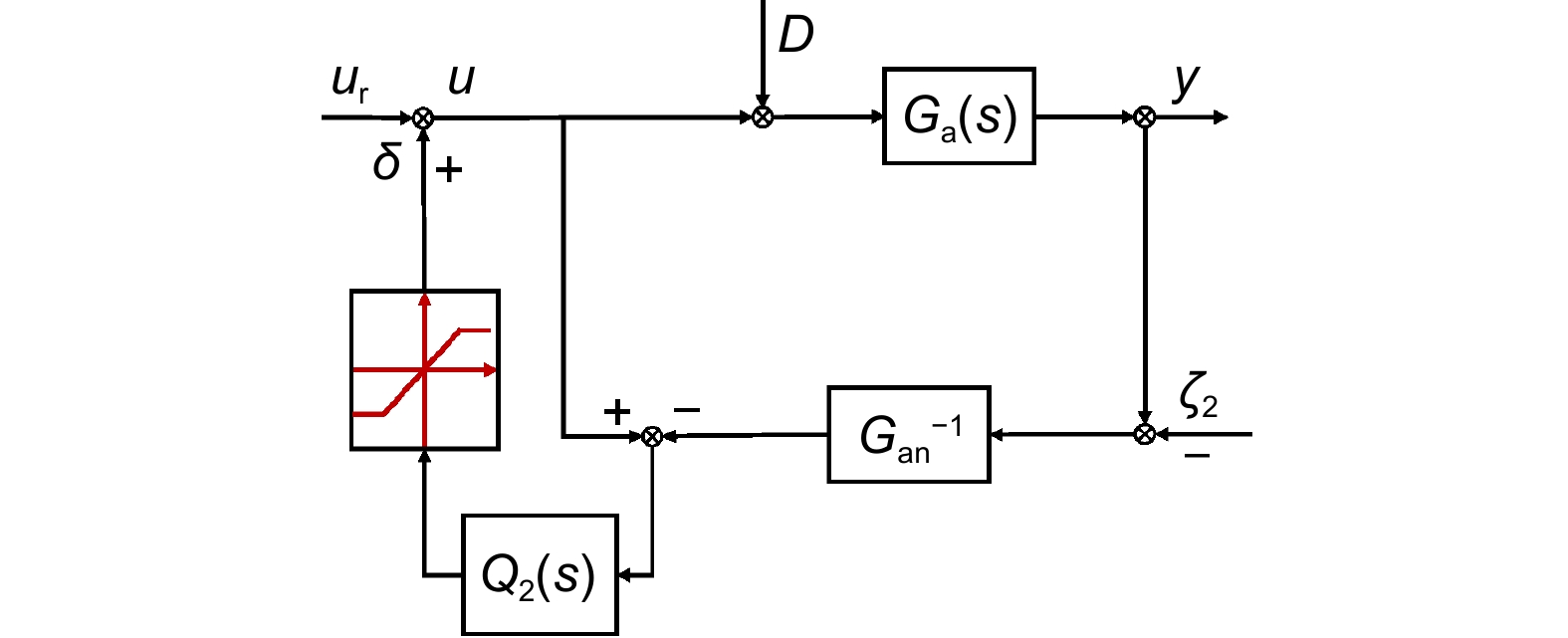
在图3基础上对观测器结构加以优化,将一饱和有界函数置于{Q_2}(s)输出处,如图4所示,其中y是输出的加速度,y积分之后得到Y。
此饱和函数形式为
sat(B)=\left\{\begin{array}{*{20}{c}}kb, & B\geqslant b \\ kB, & \left|B\right| < b \\ -kb, & B\leqslant-b\end{array}\right.\; , 式中:B为输入信号的幅值;b为设置的阈值;k为线性部分的斜率,这里取1。由于上述函数为非线性函数,为便于频域分析,用一近似的线性函数DF(b) (记作\beta )描述sat(B)特性。
DF(b) = \dfrac{2}{{\text{π}} }\left[ {\arcsin \dfrac{b}{B} + \dfrac{b}{B}\sqrt {1 - {{\left(\dfrac{b}{B}\right)}^2}} } \right]\;. 3.2.1 稳定性分析
图4结构的特征方程为
{E_2}(s) = 1 + ({G_{\mathrm{a}}}G_{{\mathrm{an}}}^{ - 1} - 1){Q_2}\beta\;. 令 G_{\mathrm{a}}=G_{{\mathrm{an}}}(1+\mathit{\Delta}_2) , \mathit{\Delta}_2 表示对象不确定性的可变传递函数,因此 E_2(s)=1+\mathit{\Delta}_2Q_2\beta 。依照小增益定理,要求 \left\| Q_2\beta \right\| _{\infty} < \left\| \dfrac{1}{\mathit{\Delta}_2} \right\| _{\infty} 恒成立。所以当 BW(Q_2\beta) < L_{G\mathrm{_a}\approx G_{\mathrm{an}}} 时,上式成立,饱和扰动观测器得以稳定。与传统观测器相比,在该稳定性条件下增加了可调参数——{Q_2}与\beta 。
3.2.2 \beta 对{Q_2}的作用
结合频响测试及模型简化,{G_{{\mathrm{an}}}} \approx \dfrac{{k\omega _{\mathrm{n}}^2s}}{{{s^2} + 2\varsigma {\omega _{\mathrm{n}}}s + \omega _{\mathrm{n}}^2}}采用等效结构(\varsigma 为阻尼比,ωn为自然震荡频率,k为系数)。在{Q_2}G_{{\mathrm{an}}}^{ - 1}可实现条件下,选取{Q_2} = \dfrac{1}{{{{(\tau s)}^2} + \xi \tau s + 1}} (\tau 为时间常数,\xi 为阻尼系数)的形式。假设在满足上述稳定性条件下滤波器限制带宽为{f_0} ({Q_2}\beta 的带宽也为{f_0}),下面求{Q_2}的带宽f:
20\lg \left| {\dfrac{\beta }{{{{(\tau s)}^2} + \xi \tau s + 1}}} \right| = - 3\;, 则有
\dfrac{{{\beta ^2}}}{{{{(1 - {\tau ^2}{\omega _0}^2)}^2} + {\xi ^2}{\tau ^2}{\omega _0}^2}} = \dfrac{1}{2} \;, 这里{\omega _0} = 2{\text{π}} {f_0}。为便于计算,令\xi = \sqrt 2 (下同),计算可得
{\tau ^4}{\omega _0}^4 + 1 = 2{\beta ^2} \;, 为求{Q_2}的带宽f,有
\dfrac{1}{{{{(1 - {\tau ^2}{\omega ^2})}^2} + {\xi ^2}{\tau ^2}{\omega ^2}}} = \dfrac{1}{2}\;, 可得
{\tau ^4}{\omega ^4} + 1 = 2 \;. 联立式(8)和式(10),f=\dfrac{f_0}{\sqrt[4]{2 \beta^2-1}}\left(\dfrac{\sqrt{2}}{2}< \beta \leqslant 1, \right. \left.\dfrac{1}{\sqrt[4]{2 \beta^2-1}} \geqslant1\right),所以f \geqslant {f_0}。这表明\beta 对提升{Q_2}带宽具有正向作用,同时也可得到f与\beta 的反比关系。
可注意到,当0 < \beta \leqslant \dfrac{{\sqrt 2 }}{2}时,20\lg \left| {\dfrac{\beta }{{{{(\tau s)}^2} + \xi \tau s + 1}}} \right| < - 3恒成立,说明此时{Q_2}带宽理论上可无限扩大。而对噪声传递函数 tf_{\zeta_2\to y}=\dfrac{Q_2\beta G_{\mathrm{an}}^{-1}G_{\mathrm{a}}}{1+Q_2\beta(G_{\mathrm{an}}^{-1}G_{\mathrm{a}}-1)} (tf是传递函数的缩写)来说,\beta 相同时,{Q_2}带宽不宜设置过大。
3.2.3 \beta 对观测器能力的作用
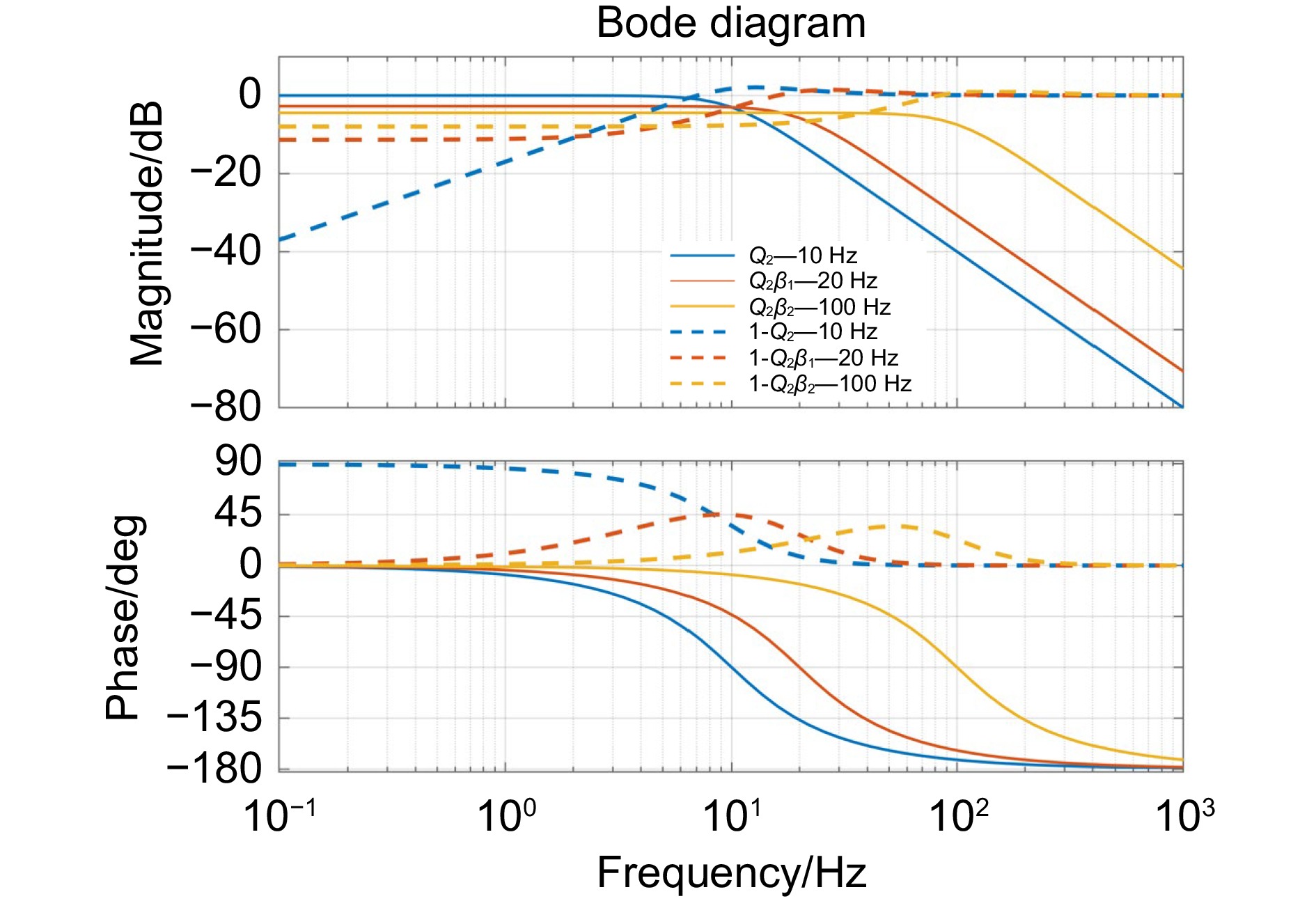
根据灵敏度函数,1 - {Q_2}在一定程度可代表观测器扰动抑制能力。如图5所示,绘制了{Q_2}、{Q_2}\beta 、1 - {Q_2}及1 - {Q_2}\beta 的Bode图,可说明两个问题。其一,红色实线(黄色实线)与蓝色实线对比,在某一频率前{Q_2}\beta 低于{Q_2},对应的1 - {Q_2}\beta (红色虚线或黄色虚线)高于1 - {Q_2} (蓝色虚线),两组曲线的相交频率具有一定对应关系,这里不多加探讨。可得到{Q_2}\beta 对应的观测器能力弱于{Q_2}对应的观测器能力。而随着频率变大,{Q_2}\beta 对高频的衰减小于{Q_2},对应的1 - {Q_2}\beta 小于1 - {Q_2},表明\beta 的引入增强了观测器的中高频扰动抑制能力。其二,红色实线与黄色实线相比可说明,{Q_2}带宽越大,\beta 越小,观测器低频性能牺牲越多,而观测器高频能力越强。
![图 5 不同带宽的Q以及对应1-Q的Bode图]() 图 5
图 5不同带宽的Q以及对应1-Q的Bode图
Figure 5.Bode plots of Q with different bandwidths and corresponding 1-Q
4. 双观测器
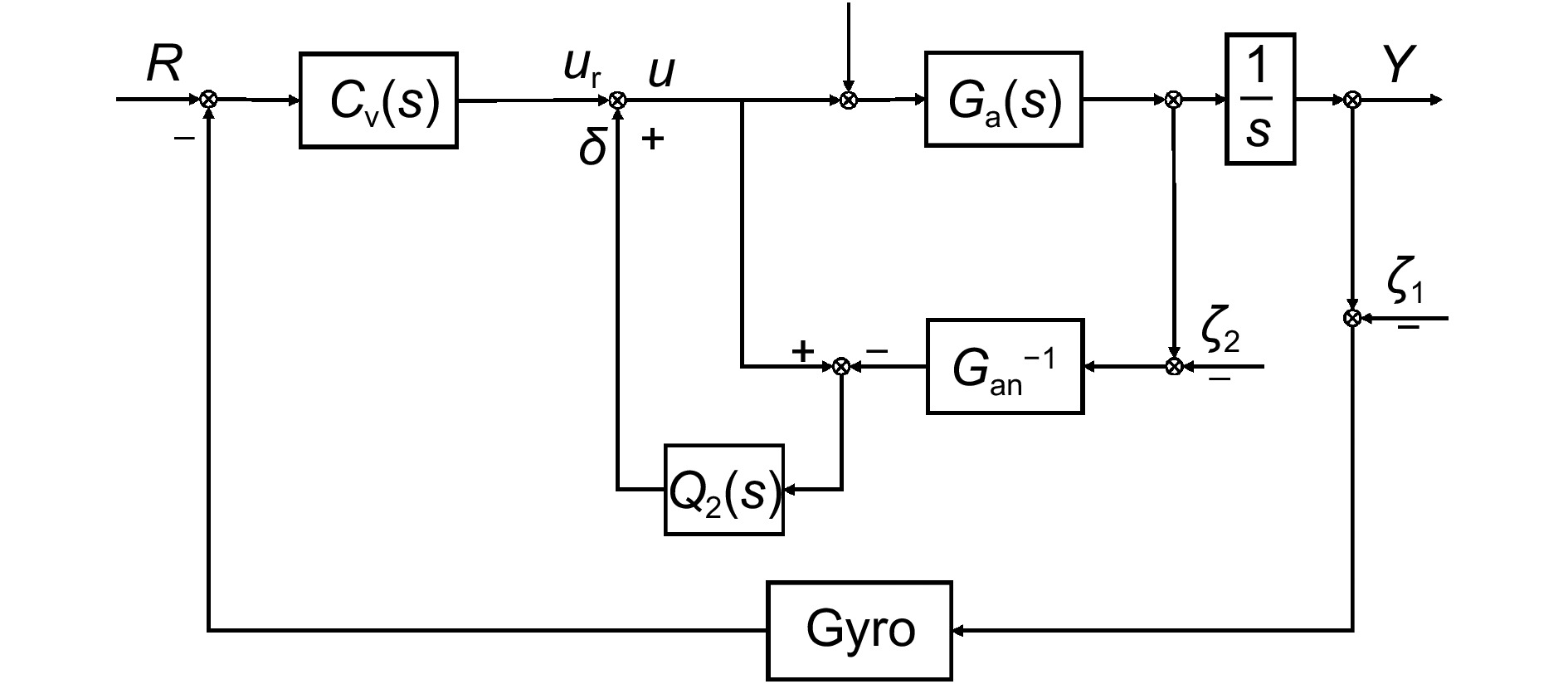
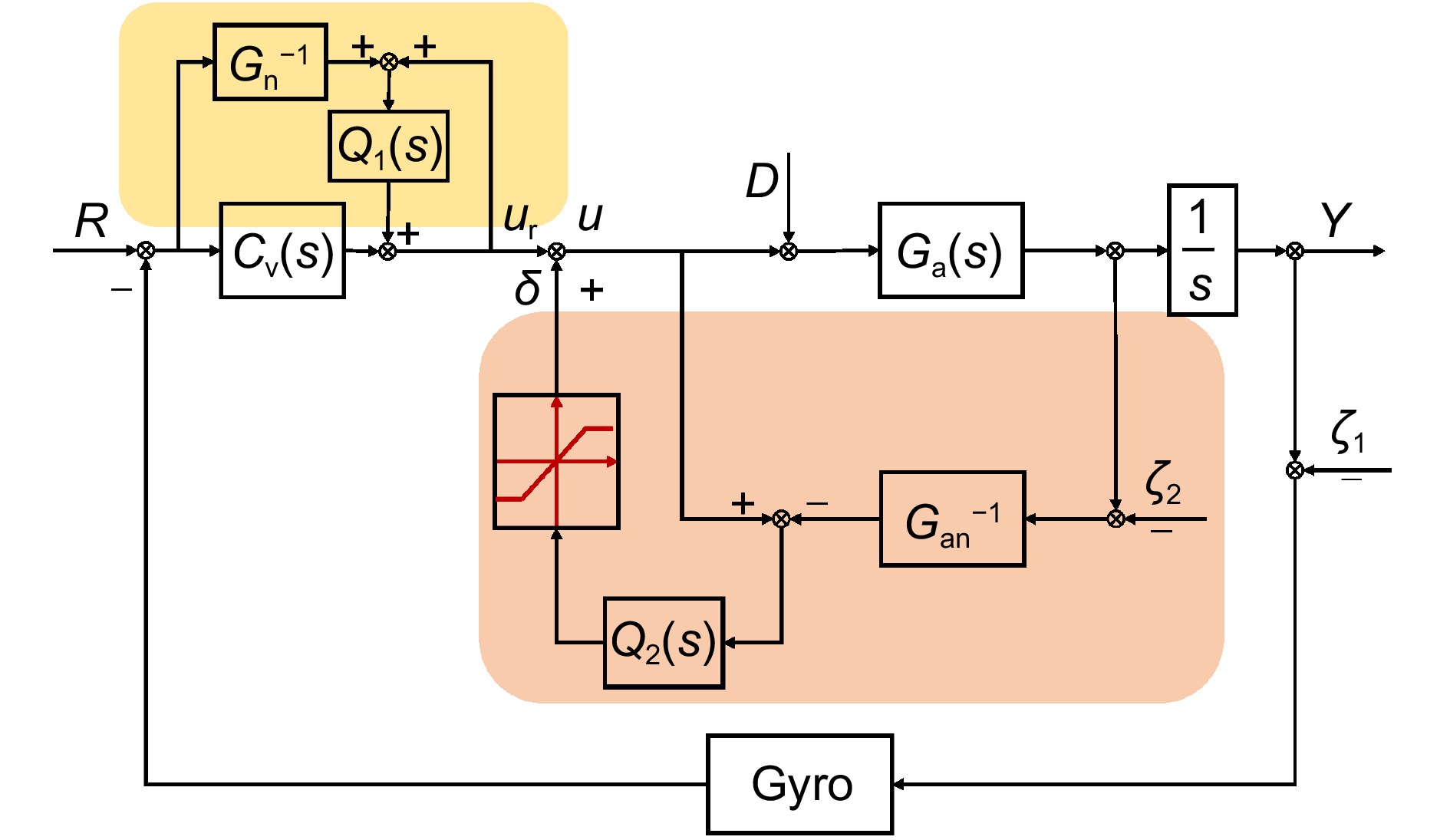
基于第2节与第3节的分析,将两种观测器综合在一起,如图6所示。
4.1 稳定性分析
此结构特征方程{E_3}(s)为
\begin{split}E_3(s)= & 1+C_{\mathrm{v}}G+Q_1(G_{\mathrm{n}}^{-1}G-1)+Q_2\beta(1-Q_1)(G_{\mathrm{an}}^{-1}G_{\mathrm{a}}-1) \\ = & (1 + C_{\mathrm{v}}G)\left[ 1 + \dfrac{Q_1(G_{\mathrm{n}}^{ - 1}G - 1) + Q_2\beta(1 - Q_1)(G_{\mathrm{an}}^{ - 1}G\mathrm{_a} - 1)}{1 + C_{\mathrm{v}}G} \right] \\ = & (1+C_{\mathrm{v}}G)\left[1+\varphi(s)\right]\; . \end{split} 单环中1 + {C_{\mathrm{v}}}G是稳定的,所以只考虑1 + \varphi (s)即可。1 + \varphi (s)由小增益定理得
{\left\| {\dfrac{{{Q_1}(G_{\mathrm{n}}^{ - 1}G - 1) + {Q_2}\beta (1 - {Q_1})(G_{{\mathrm{an}}}^{ - 1}{G_{\mathrm{a}}} - 1)}}{{1 + {C_{\mathrm{v}}}G}}} \right\|_\infty } < 1 \;, \left\| \dfrac{Q_1\mathit{\Delta}_1+Q_2\beta(1-Q_1)\mathit{\Delta}_2}{1+C_{\mathrm{v}}G} \right\| _{\infty} < 1\; , 式中:G=Gn(1+ \mathit{\Delta}_1 ),其中 \mathit{\Delta}_1 表示速度对象不确定性的可变传递函数。随着频率的增加,1 + {C_{\mathrm{v}}}G逐渐收敛至1,而 \mathit{\Delta}_1 与 \mathit{\Delta}_2 逐渐增大。若使式(13)成立,{Q_1}带宽与{Q_2}\beta (1 - {Q_1})的带宽应各自小于对应模型精确建模的频率,此时闭环系统稳定。所以上式成立的充分条件为 \left\{\begin{array}{*{20}{c}}BW(Q_1) < L_1 \\ BW\left[Q_2\beta(1-Q_1)\right] < L_2\end{array}\right., 其中{L_1}与{L_2}分别为对应模型精确建模的频率范围。
4.2 误差观测器对饱和观测器的影响
对于图2,选取{Q_1} = \dfrac{1}{{{{(\tau s)}^2} + \xi \tau s + 1}}的低通滤波器形式,下面详细分析1 - {Q_1}的特性。
4.2.1 放大效应
\left| {1 - {Q_1}} \right|_{s = {\mathrm{j}}\omega }^2 = \dfrac{{{{(\tau \omega )}^4} + 2{{(\tau \omega )}^2}}}{{{{(\tau \omega )}^4} + 1}}\;. 当\tau \omega = \dfrac{{\sqrt 2 }}{2},也就是\omega = \dfrac{{\sqrt 2 }}{{2\tau }}时,\left| {1 - {Q_1}} \right| = 1,表明该频率的对数幅频(Bode)响应为0。当\tau \omega > \dfrac{{\sqrt 2 }}{2}时,\left| {1 - {Q_1}} \right| > 1,表明随着频率逐渐增大;当\omega > \dfrac{{\sqrt 2 }}{{2\tau }}时,对数幅频(Bode)响应会出现大于0也就是放大的情形。令t = {(\tau \omega )^2},则{\left| {1 - {Q_1}} \right|^2}变成f(t) = \dfrac{{{t^2} + 2t}}{{{t^2} + 1}}\left(t > \dfrac{1}{2}\right),对f(t)求导:
\dfrac{{{\mathrm{d}}f(t)}}{{{\mathrm{d}}t}} = \dfrac{{ - 2({t^2} - t - 1)}}{{{{({t^2} + 1)}^2}}}\;. 式(15)的零点为t = \dfrac{{\sqrt 5 + 1}}{2}。当\dfrac{1}{2} < t \leqslant \dfrac{{\sqrt 5 + 1}}{2}时,\dfrac{{{\mathrm{d}}f(t)}}{{{\mathrm{d}}t}} \geqslant 0,f(t)递增;当t > \dfrac{{\sqrt 5 + 1}}{2}时,\dfrac{{{\mathrm{d}}f(t)}}{{{\mathrm{d}}t}} < 0,f(t)递减且\mathop {\lim }\limits_{t \to + \infty } f(t) = 1。f{(t)_{\max }} = f\left(\dfrac{{\sqrt 5 + 1}}{2}\right) = 1.618,则1 - {Q_1}对数幅频(Bode)最大响应为2.09 dB,且恒为定值。
4.2.2 放大效应频率范围
对于{Q_1} = \dfrac{1}{{{{(\tau s)}^2} + \xi \tau s + 1}},为使{Q_1}截止频率就是其带宽,令 \tau=\dfrac{1}{2\text{π}f_{\mathrm{c}}} , f\mathrm{_c} 表示截止频率,则1 - {Q_1}放大效应起始频率为 f=\dfrac{\sqrt{2}}{2}f\mathrm{_c} 。根据上文的计算, f=\sqrt{\dfrac{\sqrt{5}+1}{2}}f\mathrm{_c} 时,1 - {Q_1}对数幅频响应最大。所以{Q_1}带宽越高,1 - {Q_1}对数幅频超过0 dB频率范围越大,与 f\mathrm{_c} 成正比,记作 nf\mathrm{_c} 。
据前文分析,{Q_2}\beta 呈现低通特性,则{Q_2}\beta (1 - {Q_1})为带通特性。由于1 - {Q_1}存在放大效应,在{Q_1}带宽一定的情况下,下面分析1 - {Q_1}对{Q_2}\beta 的影响。根据对数性质有
20\lg \left| {{Q_2}\beta (1 - {Q_1})} \right| = 20\lg \left| {{Q_2}\beta } \right| + 20\lg \left| {1 - {Q_1}} \right|\;. 据 BW\left[Q_2\beta(1-Q_1)\right] < L_2 ,有
20\mathrm{lg}\left|Q_2\beta(1-Q_1)\right|_{s=\mathrm{j}·2\text{π}f_2}\leqslant-3\; , 式中:{f_2}为满足稳定性条件的最大频率。由于\omega > \dfrac{{\sqrt 2 }}{{2\tau }},有0 < 20\lg \left| {1 - {Q_1}} \right| \leqslant 2.09,所以 - 5.09 \leqslant 20\lg \left| {{Q_2}\beta } \right| < - 3,此时\beta 大多落入0 < \beta \leqslant \dfrac{{\sqrt 2 }}{2}内。这说明由于1 - {Q_1}的放大效应,为满足稳定性要求,{Q_2}\beta (1 - {Q_1})中的\beta 必须小于仅应用{Q_2}\beta (此时仅应用饱和观测器)中的\beta ,也就是双观测器的饱和阈值要小于仅饱和观测器的阈值。
4.3 饱和观测器对误差观测器的影响
上面已分析1 - {Q_1}对{Q_2}\beta 的影响,接下来分析{Q_2}\beta 对1 - {Q_1}的作用。结合式(17),使{Q_2}\beta (1 - {Q_1})符合稳定性条件的充分条件是 nf\mathrm{_c} < f_2 ,此时满足20\lg | {{Q_2}\beta (1 - {Q_1})} | \leqslant - 3,表明在保证系统足够的中高频扰动抑制能力时双观测器中的{Q_1}带宽需减小。
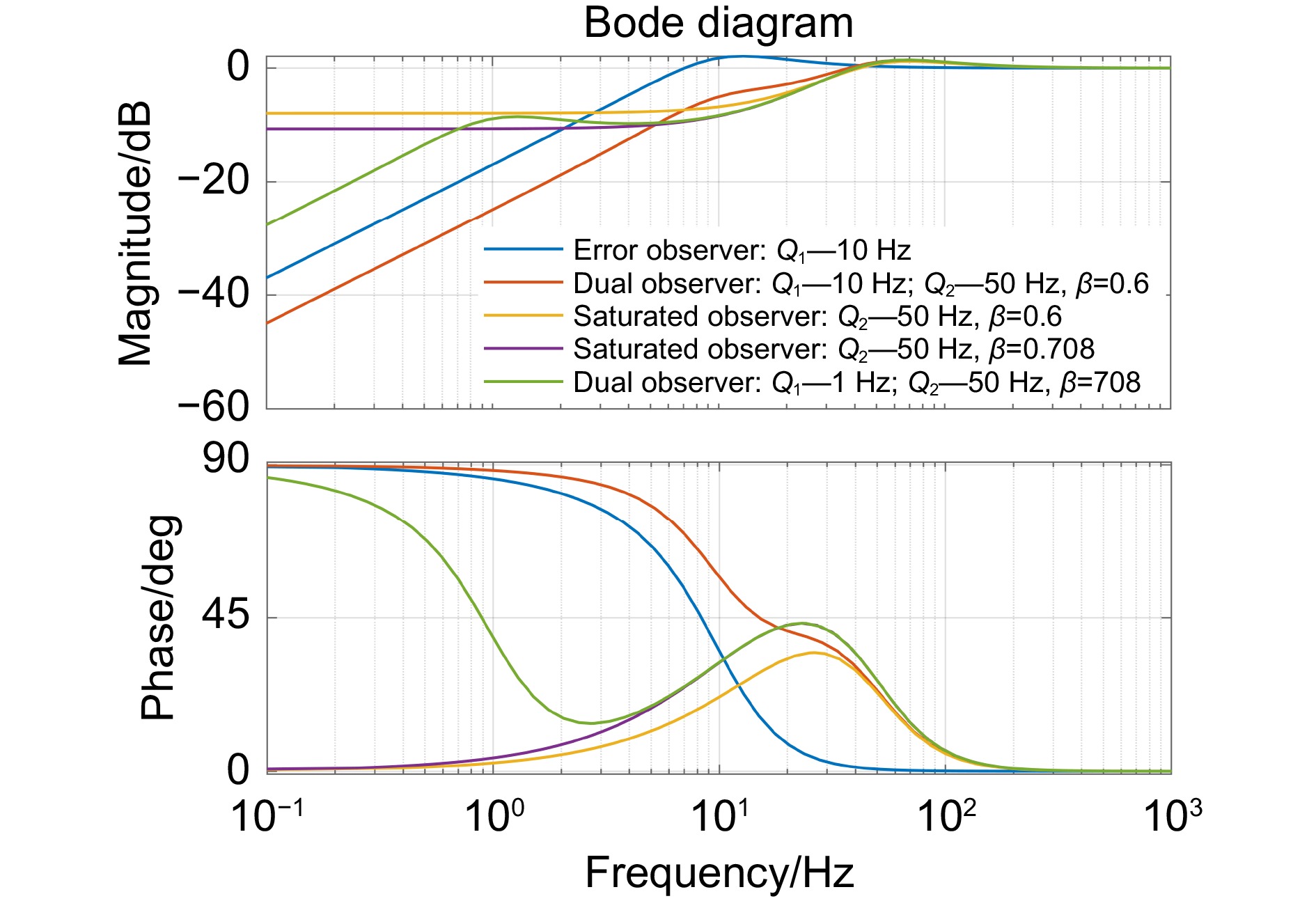
4.4 扰动抑制能力分析
图6中的扰动抑制函数为
\dfrac{Y}{D} = \dfrac{G(1-Q_1)(1-Q_2\beta)}{1 + C_{\mathrm{v}}G+Q_1(G_{\mathrm{n}}^{-1}G-1)+Q_2\beta(1-Q_1)(G_{\mathrm{an}}^{-1}G_{\mathrm{a}}-1)}\; . 根据\dfrac{Y}{D},绘制了可代表扰动抑制能力的Bode图,如图7所示。所有滤波器带宽均满足上文稳定性条件,同时\beta 也按照对应公式求出。整体上,双观测器(红色曲线)结合误差观测器(蓝色曲线)与饱和观测器(黄色曲线)的优点,对较宽频的扰动均有抑制作用。对比红色曲线与紫色曲线,反映出误差观测器影响着\beta 的选取。对比红色曲线与绿色曲线,说明\beta 的选取同样也影响着误差观测器,绿色曲线牺牲较大低频能力,得到中高频能力的部分提升,同时也反映了\beta 与{Q_1}的反比关系。该仿真符合上述理论分析,并为双观测器的参数选取提供了理论指导。当载体扰动频率较低(诸如车载扰动主要能量集中在2~10 Hz)时,可选取红色曲线对应的各滤波器参数。当载体扰动频率范围较宽(例如舰载扰动频率集中在0.1~100.0 Hz)时,可采用较低带宽的{Q_1}、较高带宽的{Q_2}与较小的\beta 的组合。当载体扰动频率较高(诸如星载)时,可直接采用高带宽的{Q_2}与较小的\beta 的饱和观测器[21]。
![图 7 不同观测器扰动抑制性能Bode图]() 图 7
图 7不同观测器扰动抑制性能Bode图
Figure 7.Disturbance rejection performance of different observers' Bode diagram
5. 实验验证
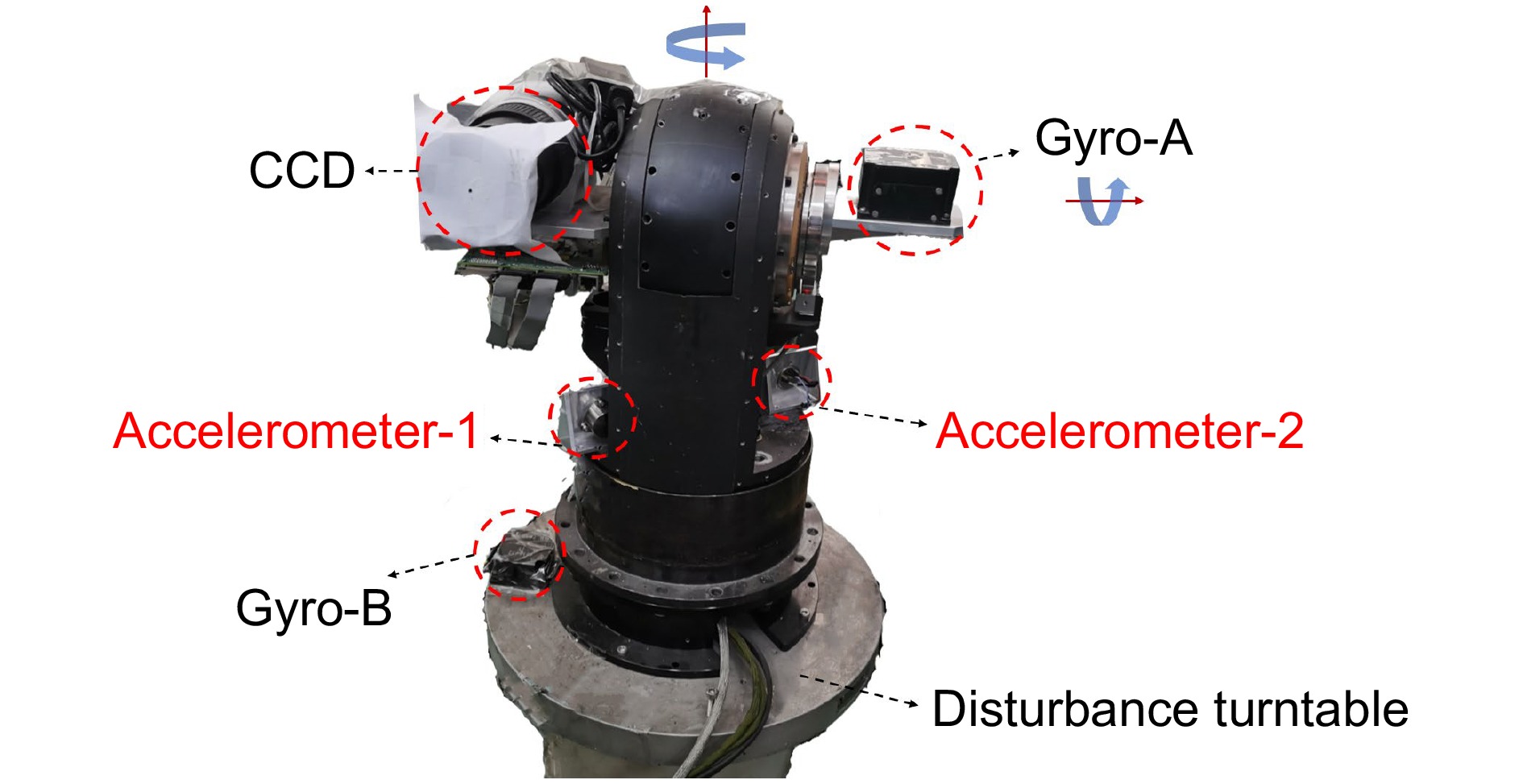
5.1 系统设置
为验证与评价提出的方法,进行了几组对比实验。实验平台如图8所示,由一个单轴扰动平台和一个双轴框架构成。陀螺B (分辨率≤0.02°/s,带宽≥100 Hz)用于闭环,使扰动转台周期运动,可模拟基座各频率扰动,扰动转台由力矩电机直接驱动。双轴框架也由力矩电机直接驱动。双轴陀螺A (分辨率为0.02 °/s,带宽≥50 Hz)和加速度计(分辨率为5×10−6 g,带宽约为上百Hz)分别测量框架相对于惯性空间的角速度和加速度,其中加速度采用两个加速度计相消的方式获得。控制系统采样频率为2 kHz。
5.2 实验结果
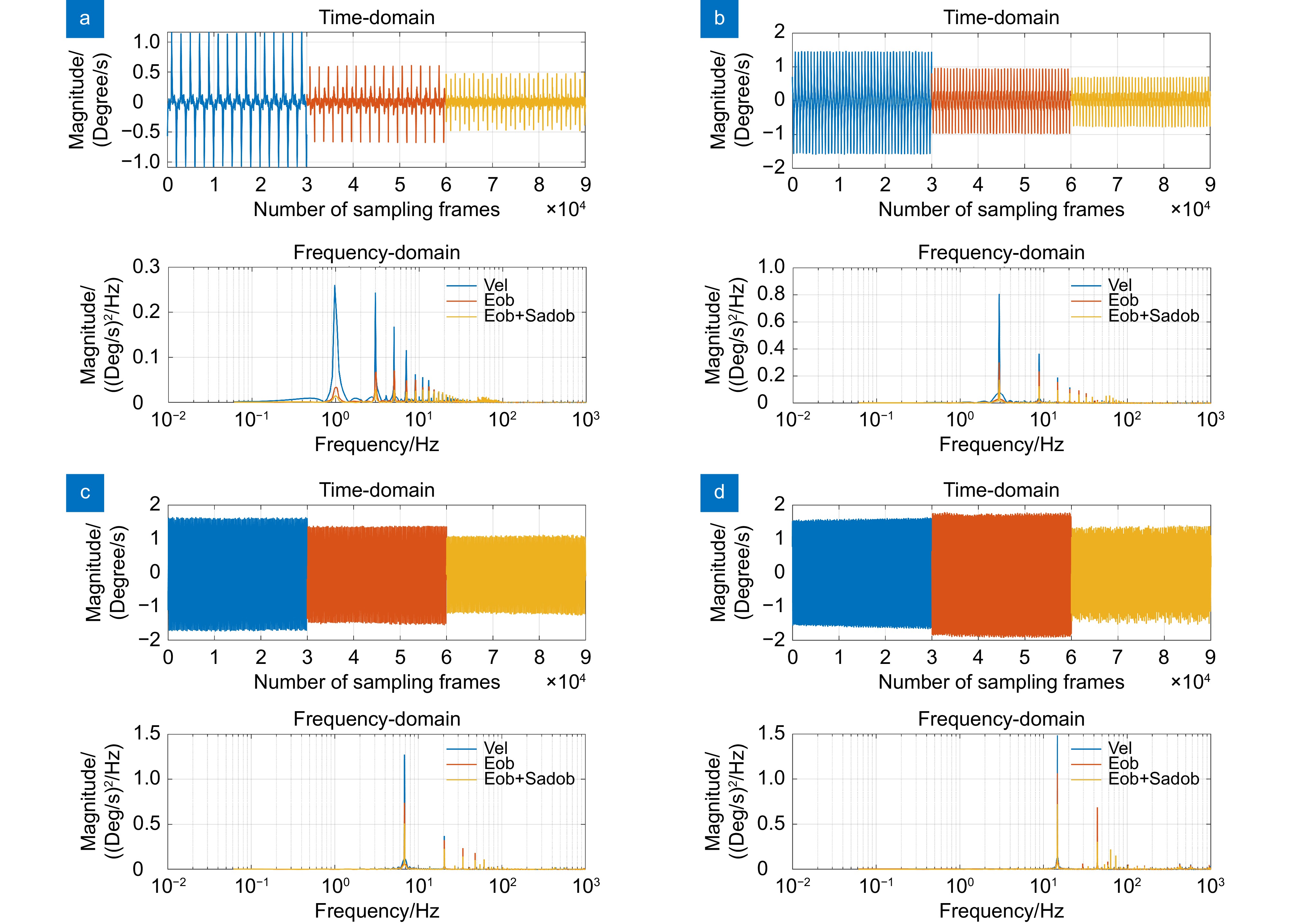
5.2.1 单频扰动的双观测器抑制
首先进行了在不同单频扰动下单速度环(Vel)、误差观测器(Eob)、双观测器(Eob+Sadob)的对比实验,扰动频率分别为1 Hz、3 Hz、7 Hz和15 Hz。Eob与Sadob对应的低通滤波器带宽分别设置为10 Hz和50 Hz,实验结果如图9所示,闭环误差峰值见表1。Eob与Vel相比,抑制低频扰动的能力较强,当扰动频率逐渐变大时,Eob抑制作用变差。而提出的双观测器将误差分别衰减59.0%、51.3%、27.2%、8.4%,表明不仅进一步增强了低频扰动抑制能力,而且对高频扰动也具抑制作用,增加了系统主动隔振能力。
![图 9 单频扰动下不同方法的角速度误差。(a) 1 Hz;(b) 3 Hz;(c) 7 Hz;(d) 15 Hz]() 图 9
图 9单频扰动下不同方法的角速度误差。(a) 1 Hz;(b) 3 Hz;(c) 7 Hz;(d) 15 Hz
Figure 9.Angular velocity error of different methods under single-frequency disturbance. (a) 1 Hz; (b) 3 Hz; (c) 7 Hz; (d) 15 Hz
Closed-loop error peak for different single-frequency disturbance (Unit: (°)/s)
不同单频扰动的闭环误差峰值(单位:(°)/s)
Disturbance frequency/Hz Vel Eob Eob+Sadob 1 1.17 0.67 0.48 3 1.58 0.98 0.77 7 1.73 1.54 1.26 15 1.66 1.92 1.52 5.2.2 混频扰动的双观测器抑制
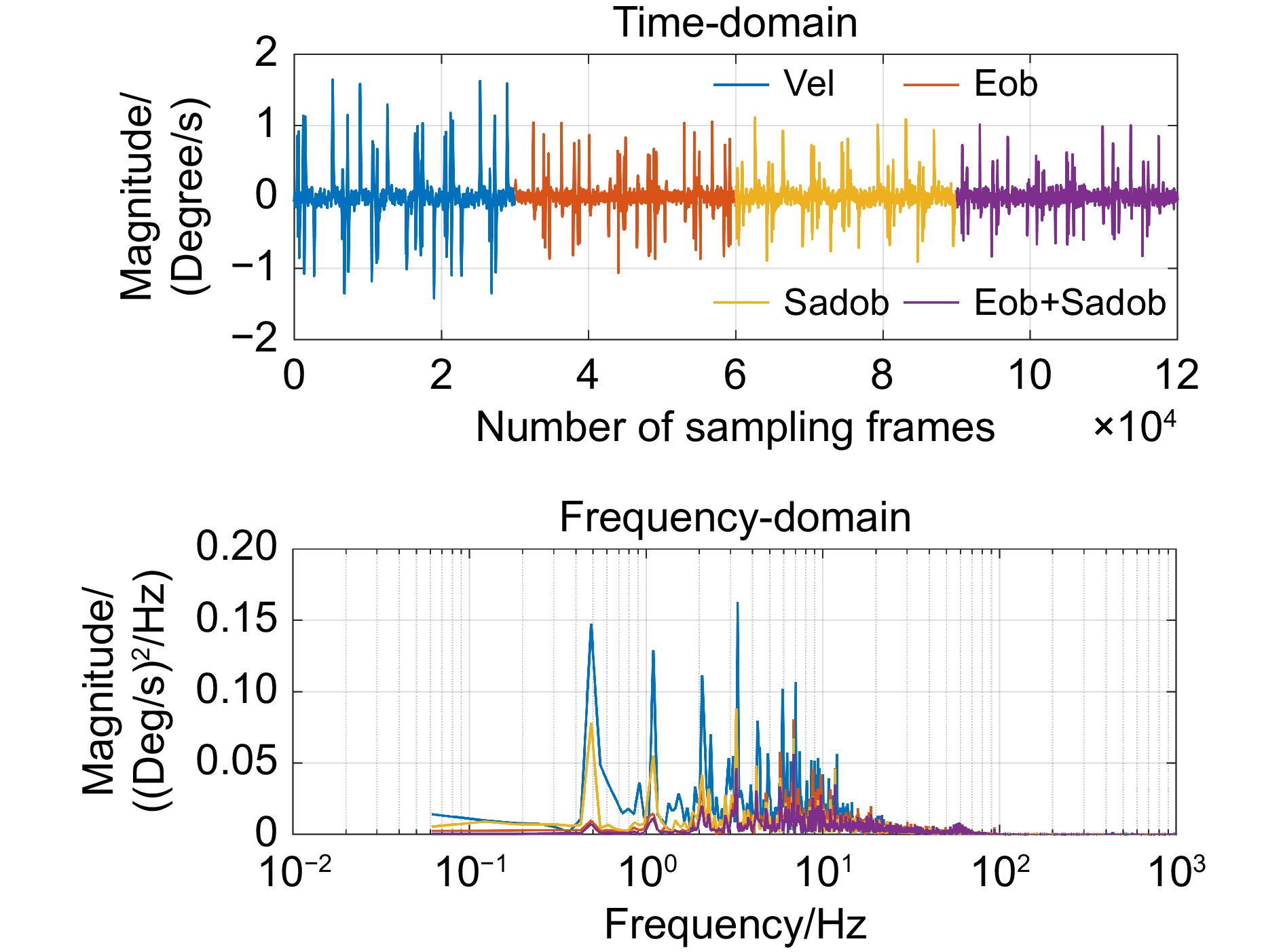
进行了混频扰动下的对比实验,其中混频扰动设置为D = 11\sin (2{\text{π}} \cdot 0.5t) + 7\sin (2{\text{π}} \cdot 1.1t) +4\sin (2{\text{π}} \cdot3.3t) + 2\sin (2{\text{π}} \cdot 7t) + \sin (2{\text{π}} \cdot 12t) (°/s),使用的低通滤波器参数同上,结果如图10所示。四种控制方法的闭环均方根误差分别为0.34、0.19、0.18、0.13,证明了双观测器抑制宽频扰动的有效性。观察频谱得知,Eob显著降低了低频能量,但其抑制带宽有限。而Sadob明显衰减了中高频能量,所以双观测器结合了Eob与Sadob的优势,衰减了较宽范围的能量,使时域误差更小。注意这里双观测器的饱和阈值设置低于Sadob,突出了Eob对Sadob的影响,符合理论分析。
![图 10 混频扰动下不同方法的角速度误差]() 图 10
图 10混频扰动下不同方法的角速度误差
Figure 10.Angular velocity error of different methods under mixed-frequency disturbance
5.2.3 横向对比
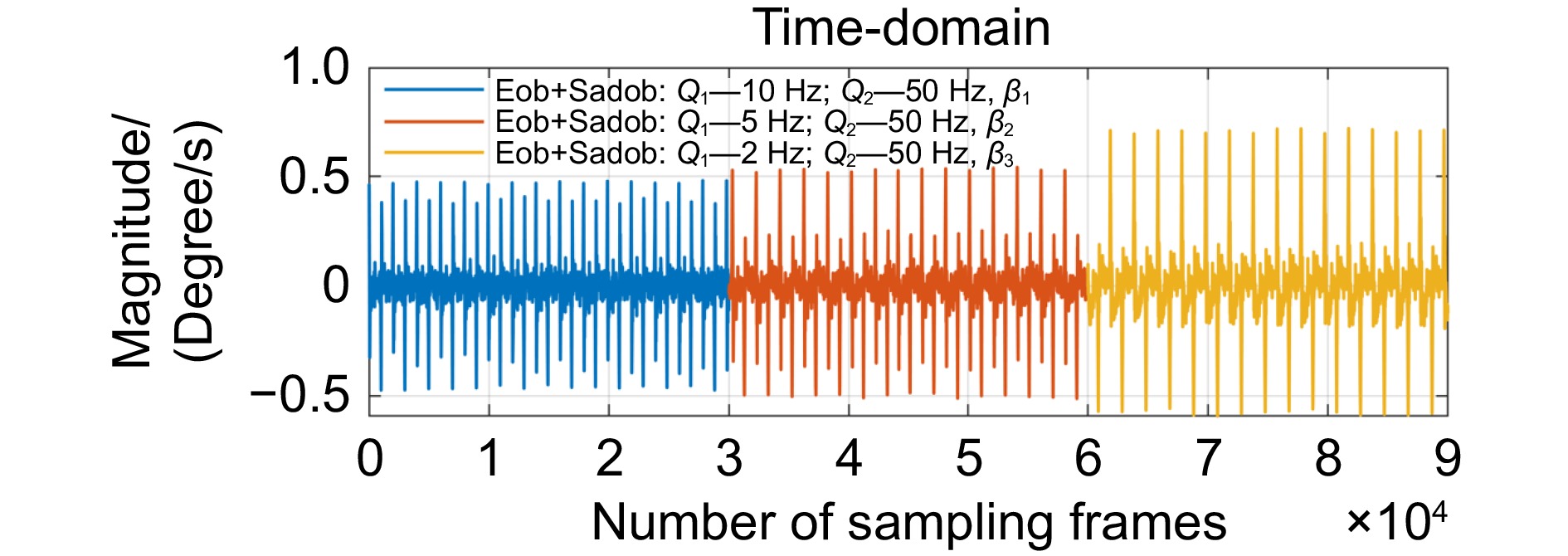
为验证Sadob对Eob的影响作用,在1 Hz扰动下进行双观测器的横向对比实验。改变饱和阈值设置,满足{\beta _1} < {\beta _2} < {\beta _3}的关系,但\beta 的设置不会超过单一Sadob的\beta 。实验过程中为保证平台稳定性,对应的Eob低通滤波器带宽为10 Hz、5 Hz和2 Hz,结果如图11所示。实验与理论一致,即{Q_1}与\beta 呈反比关系。对应的均方根误差分别为0.10、0.11、0.14,随着\beta 的增大而增大,{Q_1}带宽减小削弱了低频扰动抑制性能,因此对于各观测器的带宽参数需根据不同应用场景的扰动特性选择。
![图 11 不同参数的双观测器角速度误差]() 图 11
图 11不同参数的双观测器角速度误差
Figure 11.Angular velocity error of dual observer with different parameters
6. 结 论
本文提出一种双观测器方案,解决ISP主动扰动抑制能力不足的问题。围绕着单速度环,先后搭建了误差观测器和加速度扰动观测器。由于它们的能力均受到系统稳定性限制,所以引入饱和限制模块置于加速度观测器输出处构成饱和观测器。仔细分析饱和观测器的特性,发现其与误差观测器理论上可实现互补。双观测器结合了误差观测器与饱和观测器的优点,理论上实现ISP宽频扰动抑制。同时也分析了两个观测器间的内部作用并阐述了权衡问题。实验表明,双观测器弥补了误差观测器能力有限的问题,增加了ISP扰动抑制能力,实现宽频扰动抑制。实验也证明了两个观测器的相辅相成、相互制约的关系,并为不同类型载体的伺服控制提供参数化选择。
利益冲突
所有作者声明无利益冲突
-
参考文献
[1] Hilkert J M. Inertially stabilized platform technology concepts and principles[J]. IEEE Control Syst Mag, 2008, 28(1): 26−46.
DOI: 10.1109/MCS.2007.910256[2] Masten M K. Inertially stabilized platforms for optical imaging systems[J]. IEEE Control Syst Mag, 2008, 28(1): 47−64.
DOI: 10.1109/MCS.2007.910201[3] 王玉, 边启慧, 廖军, 等. 惯性稳定万向架中基于SBG惯导的捷联控制技术[J]. 光电工程, 2023, 50(5): 220238.
DOI: 10.12086/oee.2023.220238Wang Y, Bian Q H, Liao J, et al. Strapdown inertial stabilization technology based on SBG inertial navigation in inertial stabilization gimbal[J]. Opto-Electron Eng, 2023, 50(5): 220238.
DOI: 10.12086/oee.2023.220238[4] Lin Z C, Liu K, Zhang W. Inertially stabilized platform for airborne remote sensing using magnetic bearings[J]. IEEE/ASME Trans Mechatron, 2016, 21(1): 288−301.
DOI: 10.1109/TMECH.2015.2451137展开 -
版权信息
版权属于中国科学院光电技术研究所,但文章内容可以在本网站免费下载,以及免费用于学习和科研工作 -
关于本文
引用本文
Citation:边启慧, 苗青青, 唐涛, 马浩统. 惯性稳定平台中的双观测器宽频扰动抑制技术[J]. 光电工程, 2025, 52(3): 240305. DOI: 10.12086/oee.2025.240305Citation:Bian Qihui, Miao Qingqing, Tang Tao, Ma Haotong. Wide-band disturbance rejection technique of dual observer for an inertially stabilized platform. Opto-Electronic Engineering 52, 240305 (2025). DOI: 10.12086/oee.2025.240305导出引用出版历程
- 收稿日期 2024-12-22
- 修回日期 2025-02-09
- 录用日期 2025-02-10
- 刊出日期 2025-03-27
文章计量
访问数(694) PDF下载数(29)
- 694 访问数
- 29 下载数
 下载:
下载: