

 E-mail Alert
E-mail Alert RSS
RSS-
摘要
本文研究了一种基于贝塞尔光束的远距离激光三维成像系统,工作波长为532 nm,在激光出射端使用贝塞尔光束代替高斯光束,利用贝塞尔光束的中心光斑能量集中且束宽不随传输距离而变化的无衍射特性,降低激光光束的发散角,提高激光三维成像的角分辨率。结合Si-APD单光子探测器,搭建了远距离激光三维成像系统,并完成了远距离验证实验。在远距离目标成像中,实现了角分辨率为18.1 µrad的激光三维成像,为远距离高分辨率激光三维成像提供了一种有效的解决方案。
Abstract
We demonstrate a new laser detection and ranging (LiDAR) system for reconstructing remote targets in three dimensions (3D). In this system, a probe beam, of which wavelength is 532 nm, working at Bessel mode rather than Gaussian mode, exhibits a typical intensity distribution of a bright central spot and some surrounding rings, and takes advantage of non-diffraction character in long-distance ranging. It is an attractive way to improve the imaging resolution of the LiDAR system. Combined with the Si-APD, we built a long-distance LiDAR system and completed the verification experiment. The results indicate that we can achieve an 18.1-µrad angle resolution in long-range target imaging, which provides an effective solution for high-resolution remote imaging.
Keywords
-
1. 引 言
ωz=ω0√1+(zf)2, 根据激光雷达对目标的扫描方式的不同,可以将激光雷达系统分为凝视型[15-17]、同步扫描型[18-21]以及两者结合的凝视扫描型[22]等。其中,凝视型和凝视扫描型[23]激光雷达均采用面阵探测器,同时探测视场内的回波光信号,结合泛光照射或者光束扫描装置,控制激光光束覆盖目标表面,实现目标三维点云图像的获取,其成像视场受面阵探测器规模的限制,面阵探测器的像元间隔决定了成像的角分辨率。因此,为了提高系统的角分辨率,需要缩小单个探测像元的靶面,减小像元间隔,这对面阵探测器的加工工艺提出了更高的要求,并且可能导致探测效率的下降以及散热问题引起的噪声增加。2005年,Richard等人[24]使用32×32像素的Si SPAD阵列,搭建了机载激光成像系统,在450 m的工作距离下,实现了1 mrad的角度分辨率。2019年,Hutchings等人[25]利用256×256像素Si SPAD阵列搭建凝视型激光成像系统,在1.2°×1.2°视场范围实现了64×64像素的三维成像,成像距离为50 m,等效角分辨率约为32.7 μrad。2022年,Gyongy等人[26]研制出256×128的Si SPAD阵列,在弱光条件下实现了64×32像素的激光成像,覆盖视场角度为20°×5°。对比单像素探测器,面阵探测器的探测死时间小,可缩小系统探测盲区[26]。但是受到加工工艺的影响,随着阵列探测像素规模的增加,阵列探测器及其读出单元工作产生热量随之增加,若无法及时散热将导致系统噪声增加,探测效率下降。在远距离工作场景中,阵列探测器像素规模以及光源能量的限制,导致凝视型激光雷达系统工作视场小,此外,回波光子被分成若干份到面阵探测器,从而降低回波信号的信噪比,同时强度分布不均匀性也为后续的图像处理提出更高的要求[25]。
激光雷达是一种主动式光电探测系统,可用于目标探测、识别和跟踪,具有高精度、高分辨率和远距离探测的优势,在智能驾驶[1-3]、林业管理[4-6]、地形地貌测绘[7-10]、火星表面探测[11]、军事探测和防御[12-14]等领域得到广泛应用。飞行时间方法是激光雷达常用的一种测距方法,通过测量激光发射和目标反射回波接收的时间间隔,结合光束扫描装置,获取目标表面的距离和灰度信息来重建目标的三维点云图像。其中,相邻两个光束之间的夹角即为激光雷达的角度分辨率,角分辨率是激光雷达系统的重要评估指标,反映了系统的目标分辨能力,角分辨率越高,雷达系统对目标的识别越精确,成像信息越丰富。
其中:ω0为高斯光束束腰,f为高斯光束共焦参数,z为光束的传输距离。随着成像距离的增加,高斯光束半径增加,成像分辨率随之下降。
本文中,我们研究了基于贝塞尔光束的远距离高分辨率激光成像系统,系统工作在532 nm波段,使用无衍射贝塞尔光束代替传统的高斯光束,利用贝塞尔光束中心光斑直径不随传输距离的增加而展宽的特性,降低激光光束的发散角,提高激光雷达系统的远距离成像的空间分辨能力。在回波探测端采用Si-APD的单光子探测器探测回波光信号,提高接收系统的探测灵敏度,最终在2.7 km处实现了具有18.1 μrad的角分辨率的激光成像。
相较于凝视型激光雷达,扫描型激光雷达利用窄波束激光照射到目标表面,激光能量更集中,可以实现更高信噪比的回波探测,适用于远距离激光成像,结合光束扫描装置,控制光束依次覆盖目标表面,从而获取目标的三维点云图像。扫描型激光雷达中,成像的角分辨率主要取决于激光光束的发散角以及光束扫描精度。因此,在使用高精度扫描装置的情况下,成像的角分辨率主要受限于激光光束的发散角。在常规的扫描型激光雷达中,通常采用高斯光束,受像差以及有限孔径的影响,在传播中会发生衍射现象,光束的发散角较大,光束半径与传输距离的对应关系为
2. 贝塞尔光束的产生
其中:m表示从右数起的台阶编号,d为一个周期内的台阶宽度。因此其透射率函数可以表示为
{E(\boldsymbolr,t)=J0(∂ρ)×e−i(ωt−βz)ρ2=x2+y2α2+β2=(ωc)2, 激光在大气中传输时会受到大气气溶胶的吸收和散射作用,导致激光能量减弱,在远距离激光成像应用中,大气衰减与大气湍流不利于贝塞尔光束的远距离传输。在远距离激光雷达中,常用的激光波长为532 nm、1064 nm和1550 nm,其中近红外波段的激光在大气中的传输损耗更小,可以更加优化远距离激光成像系统性能。但是,由于相机对于532 nm的光束更为敏感,便于观察远距离贝塞尔光束的传输特性,同时在回波探测端,近红外激光常用的InGaAs APD单光子探测器,探测靶面仅有80 μm,而532 nm激光使用的探测器为Si APD单光子探测器,探测靶面为500 μm,大靶面具有更高的耦合效率。Si APD单光子探测器虽然可以响应1064 nm的光信号,但是在1064 nm波段的探测效率仅有2%~3%。因此,本文选择532 nm作为激光成像系统的工作波长。
ts(x)=∑mδ(x−md)∗{rect(xd)×[ei2πt0d/Lrect(x−d/Ld/L)+rect(xd/L)]}. 其中:J0表示第一类零阶贝塞尔函数,α是横向波数,β是轴向波数,ω是光的角速度。因其横向光强分布I∝J20,因此被称为贝塞尔光束。贝塞尔光束的波前形状是由一系列同心圆环组成的,中心光斑的能量和周围圆环的能量之和相等,但是由于横截面积不同,在光束传输方向上,其光强分布表现为中心光斑强度最大,由内向外逐级减小,这些同心圆环的相干叠加使贝塞尔光束具有无衍射特性,在传输过程中,光束不会发生衍射扩散,中心光斑的直径保持不变。
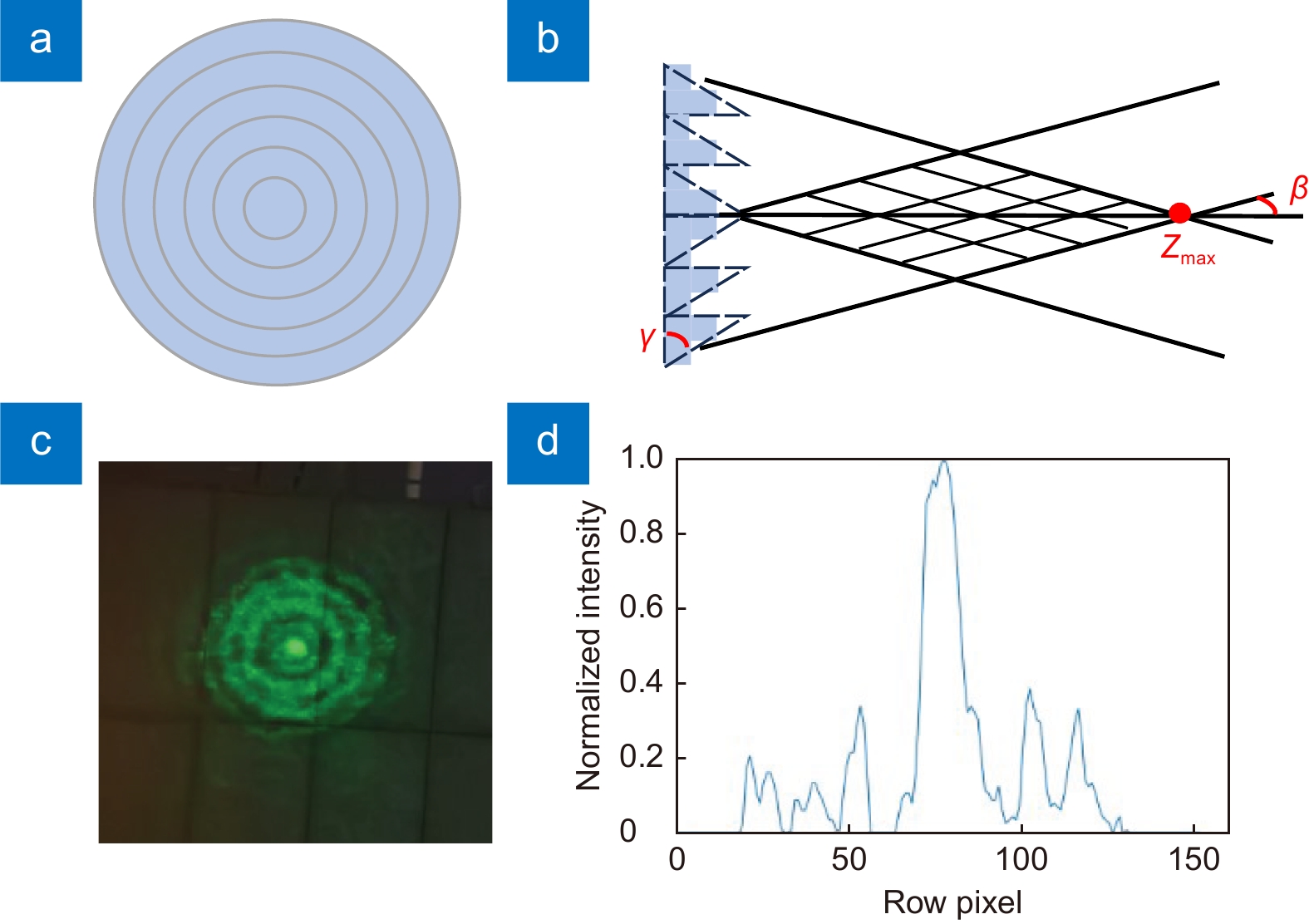
zmax 图1(c)展示了实验产生的贝塞尔光束在空间中传输2.7 km后的光斑照片,从图中可以清晰地分辨出中心光斑与外围同心圆环,且中心光斑的亮度明显高于周围圆环,中心光斑的实际直径约为5 cm,等效发散角为18.1 µrad。另外,我们将图1(c)所示的照片经过灰度处理之后,用于表征的贝塞尔光束的强度分布,图1(d)展示了贝塞尔光束的强度归一化曲线,从图中可知,贝塞尔光束中心光斑的强度与第一圈圆环的强度之比大于2,中心光斑的能量占总能量的22.8%。
在角谱理论中,将式(4)进行傅里叶变化即得到DOE后方透射光角谱为
其中,β为光束经过折射后与水平方向的夹角。当轴锥镜底角γ足够小时,tan γ ≈ 0,此时:
系统使用的DOE为直径150 mm的标准石英圆片,厚度h=1 mm,缺口弧高4 mm,有效面积>90%,深度误差约为20 nm。入射高斯光束的束腰半径ω为60 mm,DOE等效锥透镜的底角γ为0.03 mrad,DOE元件为石英材质,在532 nm的折射率为1.47。由几何光学进行推导,根据公式可以计算出DOE产生的贝塞尔光束的无衍射传输距离[30]:
产生贝塞尔光束的方法可以大致分为主动式和被动式两种。主动式是通过特定的谐振腔,使激光器直接输出贝塞尔光束;被动式是指激光器输出高斯光束经过空间调制产生贝塞尔光束。常用的被动式调制产生贝塞尔光束的方法有环缝-透镜法、轴锥镜法、空间光调制器法、计算全息法等。1998年周莉萍、赵斌等人[28]首次将贝塞尔光束应用于激光雷达系统,使用轴锥镜产生贝塞尔光束,解决三角测距中随量程增加距离分辨率下降的问题。2013年,孟洪福等人[29]利用轴锥镜生成零阶贝塞尔光束,并对70 mm处的镂空字母进行扫描成像,空间分辨率可达1 mm。利用轴锥镜产生贝塞尔光束具有较高的衍射效率,通过增加入射光直径、减小轴锥镜的底角可以增加贝塞尔光束的无衍射传输距离。由于加工工艺的限制,生产底角小、底面直径大的轴锥镜具有很高的难度。本文中,我们使用二维衍射元件 (diffractive optical element, DOE)产生贝塞尔光束,利用微纳工艺在石英片上刻蚀一系列等间隔同心圆环微结构,实现对高斯光束的调制,其剖面示意图如图1(a)所示。
零阶贝塞尔光束的电场[27]可以表示为
通过DOE的一级衍射效率为
当光束经过界面规则、周期性变化的光栅元件时,会产生衍射现象。根据光程差理论,可以求得L阶的光栅位相函数为
因此,本系统产生的贝塞尔光束最远传输距离理论上为4255 m。
理论上,本系统产生的贝塞尔光束的中心光斑直径约为3 cm。
激光光源输出的高斯激光光束经过扩束后通过DOE,经过周期排列的光栅衍射产生明暗间距相等的同心圆环,在这些同心圆环的中心,会形成一个直径较小但亮度较大的圆形光斑,即为贝塞尔光束的中心光斑。使用该方法产生的贝塞尔光束在其无衍射传输距离内,始终保持中心光斑极亮且半径恒定。贝塞尔光束中心光斑直径的公式[30]为
根据式(6)可知,阶数越大,衍射效率越高,本系统使用的DOE元件阶数为2,衍射效率约为40.5%。
![图 1 贝塞尔光束示意图。(a) 2阶DOE示意图;(b) 2阶DOE产生贝塞尔光束;(c) 2.7 km处贝塞尔光束照片;(d) 2.7 km处贝塞尔光束归一化强度曲线]() 图 1
图 1贝塞尔光束示意图。(a) 2阶DOE示意图;(b) 2阶DOE产生贝塞尔光束;(c) 2.7 km处贝塞尔光束照片;(d) 2.7 km处贝塞尔光束归一化强度曲线
Figure 1.Schematic diagram of Bessel beams. (a) Schematic diagram of the 2nd-order DOE; (b) Generation of Bessel beams by the 2nd-order DOE; (c) Photo of Bessel beams at the distance of 2.7 km; (d) Normalized intensity curve of Bessel beams at the distance of 2.7 km
3. 基于贝塞尔光束的远距离高分辨率激光雷达
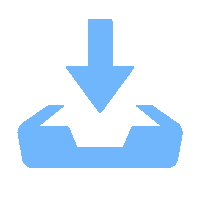
在回波探测端,本系统采用自研的空间耦合Si-APD(SAP500,Laser Component)单光子探测器探测回波光信号。单光子探测器的探测靶面的直径为500 μm,暗计数率小于1000 cps,在532 nm波段的探测效率为45%。数据采集端,本系统使用时间相关单光子计数器(TCSPC,Hydra Harp 400,Pico Quant)测量激光脉冲飞行时间,其中,PIN光电二极管输出的激光脉冲同步信号作为时间间隔测量的“开始”信号,单光子探测器的输出信号作为时间间隔测量的“停止”信号。TCSPC记录所有收集到回波光子的飞行时间,经过多周期的累计计数,获取目标反射的有效回波光子在时域上的统计分布图,为了提高测量的精度,利用质心法计算得到激光脉冲的飞行时间,获取目标的距离信息,作为三维点云数据中的z轴信息,同时记录回波计数峰的峰值计数,作为目标的灰度信息,进而结合光束扫描装置获得目标的三维点云图像以及灰度图像。为了实现光束扫描和数据采集的同步控制,激光成像上位机软件使用LabVIEW进行集成化控制,同时记录激光光束在水平和垂直方向的角度信息以及回波计数峰对应的时间—光子计数值,用于重建目标的三维点云图像和灰度图像。
基于贝塞尔光束的远距离高分辨率激光雷达装置如图2所示,系统采用异轴收发光路设计,在激光发射端,激光光源是中心波长为532 nm的脉冲激光器,重频频率为10 kHz,单脉冲能量为10 µJ,脉冲宽度为600 ps。激光器输出的光斑直径为0.5 mm,先后经过6×和45×的两级扩束镜之后,光斑尺寸扩展至135 mm,略小于扩束镜的出瞳孔径,可以有效减少衍射条纹对后续光束相位调制的影响。扩束之后的高斯激光光束经过DOE之后,被调制成贝塞尔光束,经空间传输之后照射到目标表面,在回波接收端,目标漫反射的回波光信号经接收透镜汇聚到单光子探测器的探测靶面上,同时在单光子探测器之前放置中心波长为532 nm、线宽为10 nm的窄带滤光片,滤除接收视场内背景光噪声的干扰。另外,为保证激光发射端与接收端在水平方向高度一致,系统采用如图2所示高度差为45 cm的铝合金结构进行高度补偿。系统采用电机和压电偏摆台联动的形式来实现光束的扫描,在目标表面形成密集点阵。如图2所示,在激光出射端,反射镜3放置于一维压电陶瓷偏摆台上,控制出射激光光束的方向,实现光束的垂直扫描,回波接收端则安装在一维旋转电机上,实现光束的水平扫描。旋转电机及压电陶瓷偏摆台经过标定,在载重10.5 kg的情况下,旋转电机和压电偏摆台的最小偏转角度分别可达9.7 μrad和10 μrad。
![图 2 基于贝塞尔光束的高分辨率激光雷达系统装置图。Laser:532 nm脉冲激光器;PIN:高速光电二极管;6×beam expender:6×扩束镜,入瞳0.5 mm,出瞳孔径3 mm;Mirror1,Mirror2:介质膜高反镜;45×beam expender:45×扩束镜,入瞳3 mm,出瞳孔径135 mm;Mirror3:介质膜高反镜,直径200 mm、厚度10 mm,强反射角度为45°,有效通光孔径>90%;Lens:直径75 mm、焦距85 mm;Filter:532 nm±5 nm;SPAD:Si-APD单光子探测器;TCSPC:时间相关单光子计数器;Swing motor:一维偏摆台;Rotating machines:一维角位移平台]() 图 2
图 2基于贝塞尔光束的高分辨率激光雷达系统装置图。Laser:532 nm脉冲激光器;PIN:高速光电二极管;6×beam expender:6×扩束镜,入瞳0.5 mm,出瞳孔径3 mm;Mirror1,Mirror2:介质膜高反镜;45×beam expender:45×扩束镜,入瞳3 mm,出瞳孔径135 mm;Mirror3:介质膜高反镜,直径200 mm、厚度10 mm,强反射角度为45°,有效通光孔径>90%;Lens:直径75 mm、焦距85 mm;Filter:532 nm±5 nm;SPAD:Si-APD单光子探测器;TCSPC:时间相关单光子计数器;Swing motor:一维偏摆台;Rotating machines:一维角位移平台
Figure 2.Schematic diagram of a high-resolution LiDAR system based on Bessel beams. Laser: 532 nm pulsed laser. PIN: PIN photodiode. 6× beam expender: the input pupil diameter is 0.5 mm and the output pupil diameter is 3 mm. Mirror1, Mirror2: dielectric mirror. 45× beam expender: the input pupil diameter of 3 mm and the output pupil diameter is 135 mm. Mirror3: 200 mm-diameter dielectric mirror, the thickness of the mirror is 10 mm, the strong reflection angle is 45°, and the effective aperture is greater than 90%. Lens: the diameter is 75 mm and the focal length is 85 mm. Filter: the bandwidth is 532 nm±5 nm. SPAD: Si-APD single-photon detector. TCSPC: time-correlated single-photon counter. Swing motor: one-dimensional tilt platform. Rotating machines: one-dimensional angular displacement platform
4. 远距离高分辨激光成像实验
![图 3 1.95 km目标激光三维成像实验结果。(a)目标建筑的实物图;(b)灰度图像;(c)三维距离点云图像;(d)灰度-距离融合的三维点云图像]() 图 3
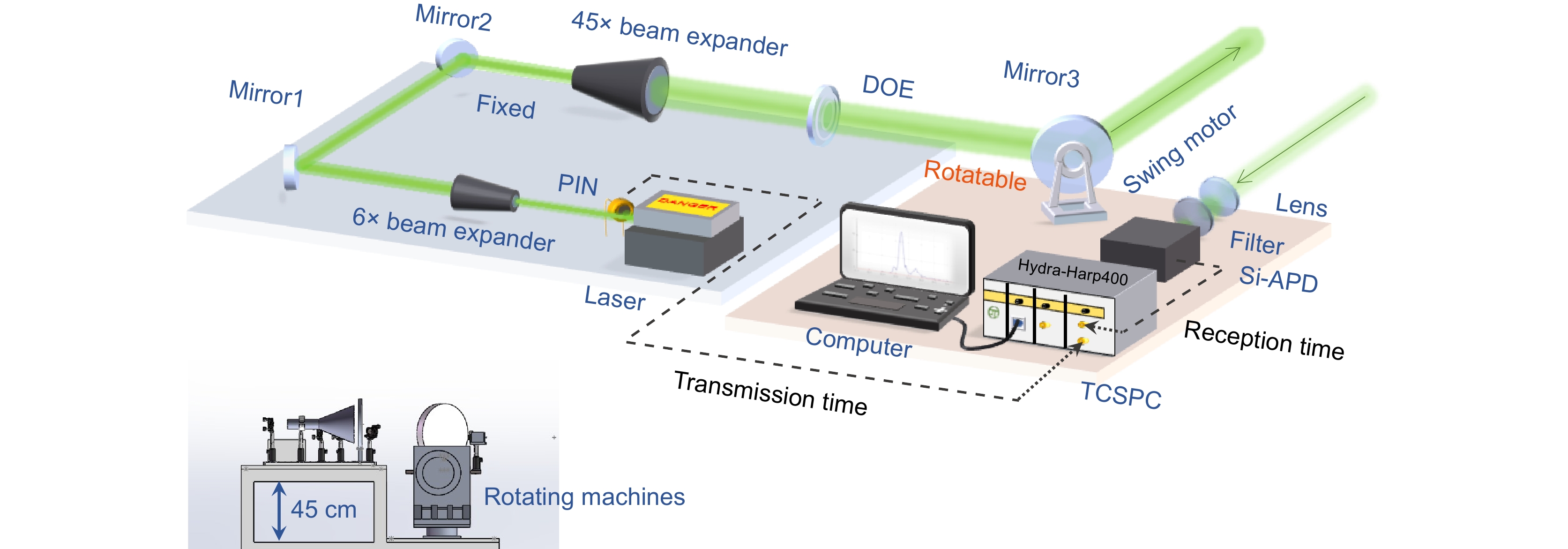
图 31.95 km目标激光三维成像实验结果。(a)目标建筑的实物图;(b)灰度图像;(c)三维距离点云图像;(d)灰度-距离融合的三维点云图像
Figure 3.3D imaging results of the target at the distance of 1.95 km. (a) Photographs of the target object; (b) Grayscale image; (c) 3D distance point cloud image; (d) Grayscale-distance fusion image
![图 4 2.7 km广告牌激光三维成像结果。(a)广告牌实物图;(b)灰度图像;(c)三维距离点云图;(d)灰度-距离融合的三维点云图像]() 图 4
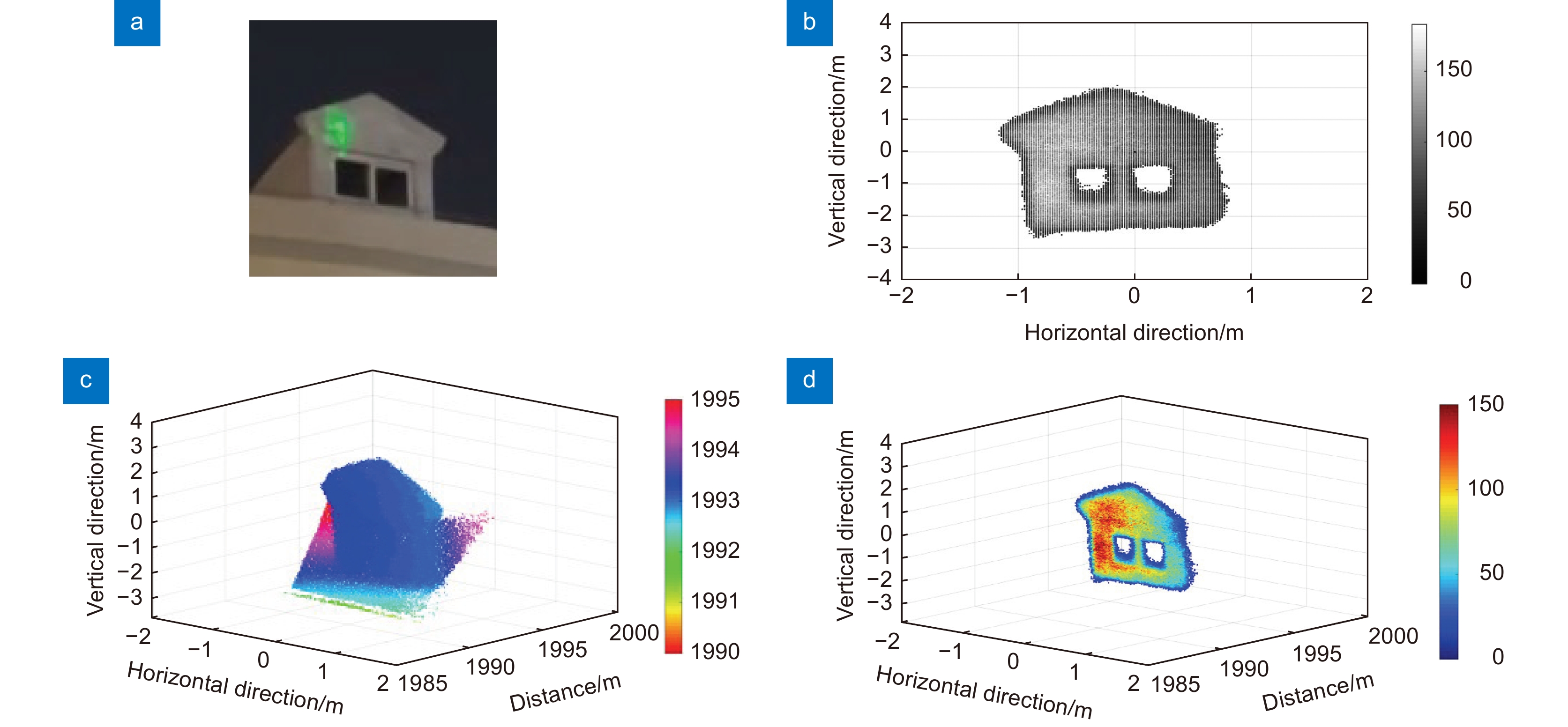
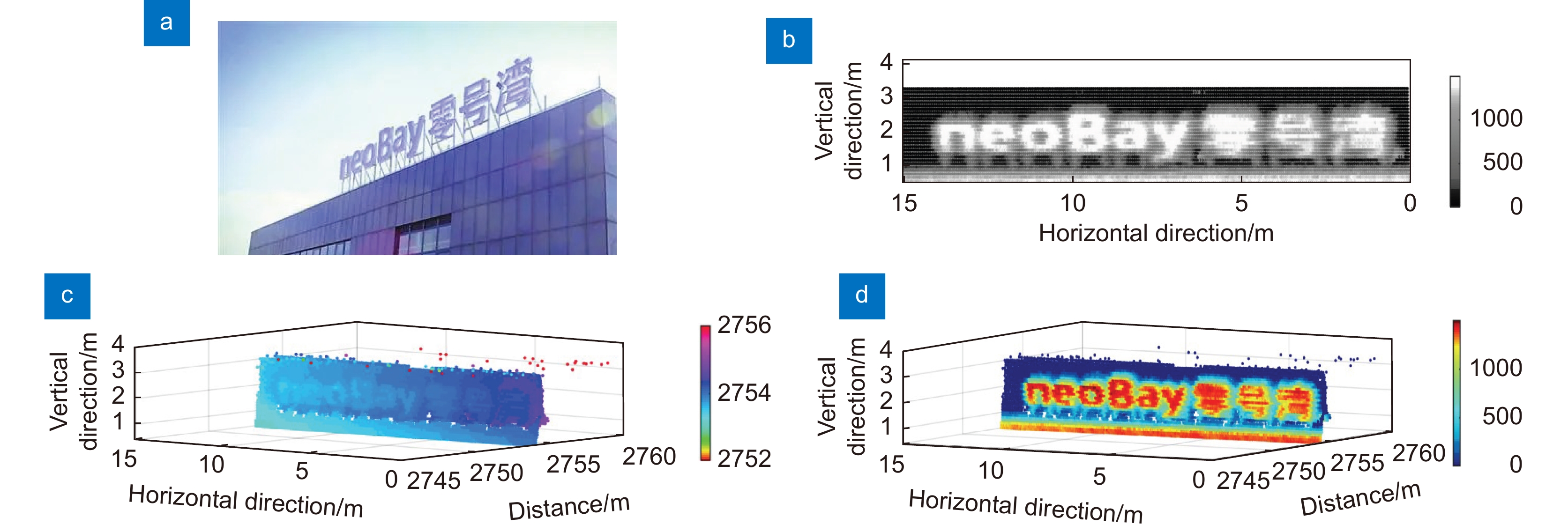
图 42.7 km广告牌激光三维成像结果。(a)广告牌实物图;(b)灰度图像;(c)三维距离点云图;(d)灰度-距离融合的三维点云图像
Figure 4.3D imaging results of the target at the distance of 2.7 km. (a) Photographs of the target object; (b) Grayscale image; (c) 3D distance point cloud image; (d) Grayscale-distance fusion image
在远距离成像时,系统平台的抖动可能导致激光光束照射在目标表面的位置发生大角度的偏转,因此成像装置需要放置在高稳定性的光学平台上,由此导致系统体积庞大,实验环境受限。我们首先选择距离约为2 km左右的建筑作为目标完成了远距离激光成像实验,获取了目标的三维距离图像和二维灰度图像,成像装置放置在居民楼12层,激光光束自窗户出射照射在目标表面,实验当天的大气能见度为25 km。目标的照片如图3(a)所示,从图中可以看出目标物体具有鲜明的棱角特征,包括屋脊、屋檐以及窗户,目标建筑的尺寸约为2 m×2 m,窗框的宽度为0.6 m。实验中,激光成像系统采用点动步进的扫描方式,在水平和垂直方向上的扫描角分辨率均为10 µrad,TCSPC的时间分辨率为640 ps,单点采样时间为0.1 s。图3展示了系统采集的目标的点云图像,图中包含了445×127个像素点,水平方向和垂直方向的扫描视场角分别为6.80 mrad和3.62 mrad。其中,图3(b)和3(c)分别为目标的灰度图像和三维距离图像,图3(d)为融合目标的灰度特征和距离信息的三维点云图像。从灰度图像中,根据目标表面不同位置反射率的不同,可以清晰地识别出目标建筑的主要特征,房屋的棱角清晰,窗框线条边界明显。从目标的三维距离点云图像中,可以得到目标的距离信息,目标表面各个测量点主要分布在距离系统1995 m的位置。通过将灰度图像和三维距离点云图像融合的方式,单次可以获取目标的轮廓特征以及距离信息,同时还可以剔除三维距离点云图像中部分背景的干扰。
为了进一步验证激光雷达系统的角度分辨率,我们选择了距离2.7 km的广告牌金属支架作为目标,广告牌实物图如图4(a)所示,底部使用脚架支撑,每根脚架的宽度约为5~6 cm,可以体现系统角度分辨能力。实验中,系统的各项参数设置保持不变,图4展示了系统采集的目标的灰度图像和三维点云图像,图中包含了420×29个像素点,水平方向和垂直方向的扫描视场角分别为6.55 mrad和2.64 mrad。图4(b)为目标的灰度图像,灰度图像表示了目标各个像素点回波信息的强弱,通过灰度图可以清晰观察到广告标语及支撑脚架的结构信息。图4(c)是目标的三维距离图像,从图中可以看出广告牌的三维点云集中分布在2755 m位置处,同时根据广告牌表面距离信息的差异,可以粗略地识别出广告标语的轮廓。如图4(d)所示,通过将目标的三维距离图像和灰度图像融合,可以清晰地识别出广告标语的文字以及整体轮廓。其中底部支架在三维图像中占据了2个像素点,结合其距离信息可以得到支架的宽度约为5.6 cm,与支架的实际尺寸相符,由此可知,成像系统的角度分辨率为18.1 μrad。
激光光束在传输过程中受到大气湍流的影响会导致相位出现随机性的微小变化,相对于高斯光束,贝塞尔光束对相位变化更加敏感。当贝塞尔光束在传输过程中受到大气湍流的影响时,相位的随机性微小变化会对其传输特性产生影响,降低其无衍射传输距离,甚至完全失去无衍射特性。为了减弱大气湍流对贝塞尔光束传输的影响,我们考虑了上海大气稳定度的特点:1)夜间地表气温迅速降低,凌晨地表气温最低时,大气的减温率也达到最小值,垂直方向湍流现象为一天中最弱,大气较为稳定;2)冬季上海地区大气稳定时间持续较长;3)高空中由于空气稀薄,大气湍流影响减弱。基于以上几点考虑,本文中,实验光束拍摄及扫描成像均在冬季凌晨0:00—4:00区间内完成,并且尽量保持光束在距离地面较高的位置传输。
5. 结 论
本文搭建了基于贝塞尔光束的远距离高分辨激光成像系统,利用贝塞尔光束的无衍射特性实现了18.1 μrad的高角度分辨率激光三维成像,为远距离高分辨率激光三维成像提供了一种可行性方案。在大气湍流不明显的条件下,验证了贝塞尔光束激光成像系统具备远距离高分辨率成像的优势。在空气稀薄的场景,如高空和太空等,湍流现象微弱甚至不存在,贝塞尔光束激光成像系统能够更好地发挥其高分辨率成像的特性。另外,通过增加衍射元件的阶数提高高斯光束转化为贝塞尔光束的衍射效率,可以延长系统的成像距离。
利益冲突
所有作者声明无利益冲突
-
参考文献
[1] Li Y, Ibanez-Guzman J. Lidar for autonomous driving: the principles, challenges, and trends for automotive Lidar and perception systems[J]. IEEE Signal Process Mag, 2020, 37(4): 50−61.
DOI: 10.1109/MSP.2020.2973615[2] Li Y, Ma L F, Zhong Z L, et al. Deep learning for LiDAR point clouds in autonomous driving: a review[J]. IEEE Trans Neural Netw Learn Syst, 2021, 32(8): 3412−3432.
DOI: 10.1109/TNNLS.2020.3015992[3] 蔡怀宇, 陈延真, 卓励然, 等. 基于优化DBSCAN算法的激光雷达障碍物检测[J]. 光电工程, 2019, 46(7): 180514.
DOI: 10.12086/oee.2019.180514Cai H Y, Chen Y Z, Zhuo L R, et al. LiDAR object detection based on optimized DBSCAN algorithm[J]. Opto-Electron Eng, 2019, 46(7): 180514.
DOI: 10.12086/oee.2019.180514[4] Li G, Huang Y, Zhang X L, et al. Hybrid maps enhanced localization system for mobile manipulator in harsh manufacturing workshop[J]. IEEE Access, 2020, 8: 10782−10795.
DOI: 10.1109/ACCESS.2020.2965300展开 -
版权信息
版权属于中国科学院光电技术研究所,但文章内容可以在本网站免费下载,以及免费用于学习和科研工作 -
关于本文
引用本文
Citation:祁慧宇, 张伟华, 翟迪迪, 朱欣怡, 李召辉. 高分辨率贝塞尔光束激光成像[J]. 光电工程, 2024, 51(3): 230243. DOI: 10.12086/oee.2024.230243Citation:Qi Huiyu, Zhang Weihua, Zhai Didi, Zhu Xinyi, Li Zhaohui. High-resolution Bessel beam laser imaging. Opto-Electronic Engineering 51, 230243 (2024). DOI: 10.12086/oee.2024.230243导出引用出版历程
- 收稿日期 2023-09-29
- 修回日期 2024-01-10
- 录用日期 2024-01-10
- 刊出日期 2024-04-04
文章计量
访问数(2410) PDF下载数(1346)
- 2410 访问数
- 1346 下载数
- 2 引用数
 下载:
下载:
 百度学术
百度学术




