

 E-mail Alert
E-mail Alert RSS
RSS-
摘要
运动阴影与目标物体粘连,具有运动一致性,常常被误检测为运动目标的一部分。运动阴影的存在改变了运动物体的形状,影响运动目标前景的进一步分析。为了解决这一问题,提出了一种基于改进萤火虫优化算法的运动阴影去除算法。通过基于种群历史最佳位置影响的改进萤火虫算法(IFA)优化2-Otsu(二维最大类间差法)距离测度函数的寻优过程,获得最佳阈值,并以此进行图像分割,去除运动阴影,并同传统2-Otsu法、粒子群算法(PSO)优化2-Otsu法、萤火虫算法(FA)优化2-Otsu法进行比较。实验结果证明,该方法较其他三种方法分别快2.69倍,1.42倍,1.21倍;另外,在区域一致性、阴影检测率和识别率方面均优于其他三种算法,验证了方法的有效性。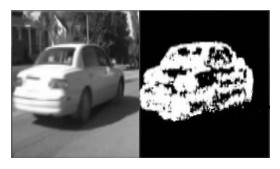
Abstract
The motion shadow is conglutinous with the object, and has the consistency of motion. It is often misdetected as a part of the moving target. The existence of motion shadow changes the shape of the moving object and influences the further analysis of the foreground of the moving target. To solve this problem, a motion shadow removal algorithm based on improved firefly optimization algorithm is proposed. The optimal threshold is obtained by optimizing the 2-Otsu distance measure function based on the improved glowworm algorithm which is based on the influence of the best position in the population history, and then the image is segmented and the moving shadow is removed. Compared our method with the traditional 2-Otsu method, particle swarm optimization (PSO) optimize 2-Otsu method, firefly optimization algorithm (FA) optimize 2-Otsu method, the experimental results show that the algorithm are 2.69, 1.42 and 1.21 times faster than the other three methods in the presence of shadow. Besides, it is superior to the other three algorithms in terms of region consistency, shadow detection rate and recognition rate. The effectiveness of the method is verified.
-
1. 引言
运动阴影去除是计算机视觉中一个重要的研究领域,目的是消除运动阴影对运动目标前景的影响,从而准确地提取出运动目标前景。阴影显著异于背景而被理解为前景[1],运动阴影与目标物体相互粘连,具有相似的运动特征,常常被误检测为运动目标前景的一部分。运动目标的形状、质心等几何特性会因阴影的存在而出现误差[2],影响运动目标的测量、定位、跟踪及多运动目标的分割[3],增加了运动目标检测的难度,对后续的识别、跟踪造成了不良的影响。
目前,阴影去除主要有基于颜色的方法和基于纹理的方法。基于颜色信息的方法是利用阴影具有色度不变性的特征来去除目标检测结果中的阴影区域。Zhou等人[4]提出了一种根据光学阴影的特点,基于HSV颜色空间和纹理局部交叉熵消除阴影的方法。Jia等人[5]提出了一种基于检测移动目标边缘特征并提取边缘阴影的方法,采用校正RGB分量比和B/R组合来改善候选阴影区域,提高了阴影检测的准确性,最终实现阴影去除。然而,这些方法的一个缺点是它们只能检测一个帧中的小区域的阴影,并且对暗色调目标的识别和阴影检测不敏感。基于纹理的方法是利用阴影具有纹理相似性的特征来去除阴影区域。Leone等人[6]提出使用Gabor函数提取和匹配图像的纹理特征来判断阴影;曹健等人[7]结合颜色空间与LBP纹理特征的方式来检测阴影区域。Najdawi等人[8]提出了一种将纹理属性与YUV色彩模型相结合的小波变换的阴影检测算法。Sanin等人[9]提出了一种使用颜色特征和一些基于梯度的纹理相关性的阴影检测方法。上述方法取得了一定效果,但是在处理平坦区域以及前景与背景纹理相似的问题上存在一定的缺陷。虽然已经存在很多种有关阴影去除的算法,但现有的算法都仅在对某一特定目标或者特定应用场景的情况下适用,且算法输出结果有待提高。
近年来许多学者利用群智能优化算法搜索最佳分割阈值,包括基于蚁群算法(ant colony algorithm, ACA)[10-11]、粒子群算法(particle swarm optimization, PSO)[12-14]、狼群算法(wolf pack algorithm, WPA)等分割方法。群智能算法计算简单,容易实现且计算效率较高,已得到了大量的应用[15]。萤火虫算法(firely algorithm, FA)[16-18]是剑桥学者Xin-She Yang于2008年提出的一种新型群体智能算法,FA与GA、PSO和FSA等其他智能算法相比,具有搜索速度快、调节参数少、收敛精度高、鲁棒性能好等特点。但是萤火虫算法后期的收敛速度相对较慢,本文在传统萤火虫算法的基础上,提出了一种受群体历史最佳位置影响的改进萤火虫算法(improvement firefly algorithm, IFA)。考虑到2-Otsu算法[19]中高复杂度、分割效果差和实时性差等问题,本文将IFA与2-Otsu法相结合,通过IFA来求解2-Otsu的目标函数,求出最优解,从而获得最佳的图像分割阈值,然后对图像进行分割,去除运动阴影。实验结果表明,通过本文提出的算法,运动阴影去除效果得到了有效改善,并提高了运行速度。
2. 传统2-Otsu阈值分割阴影去除算法
假设一个图像的灰度级为L,可以用一个二维灰度强度函数f(x,y)表示,则其邻域像素的灰度级也为L,可以通过函数g(x,y)表示,则:
g(x,y)=1k2k∑l=−kk∑q=−kf(x+l,y+q)。 令f(x,y)=i,g(x,y)=j,Mi,j为(i,j)出现的频数,则相应的联合频率密度定义为
pi,j=Mi,jN。 式中N=L−1∑i=0L−1∑j=0Mi,j为像素点总数。
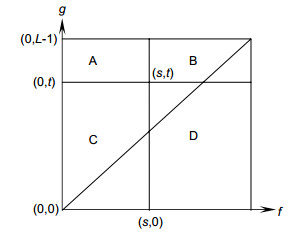
2-Otsu采用穷举法搜索遍历全部像素点来求解最佳阈值,对于有效区域上一个可行的阈值向量(s,t),可将图像灰度直方图划分成四个区域,如图 1所示。B、C区域分别代表目标前景和阴影,A、D区域代表边缘和噪声区。令ωB、ωC分别为目标前景区域和阴影区域像素点的概率和,μB、μC分别为两区域对应的像素点的斜率均值矢量,则求ωB、ωC、μB、μC如式(3)~式(6)所示。
ωB=L−1∑i=s+1L−1∑j=t+1pi,j, ωC=s∑i=0t∑j=0pi,j, μB=(μBi,μBj)T=(L−1∑i=s+1L−1∑j=t+1ipi,jωB,L−1∑i=s+1L−1∑j=t+1jpi,jωB)T, μC=(μCi,μCj)T=(s∑i=0t∑j=0ipi,jωC,s∑i=0t∑j=0jpi,jωC)T。 二维直方图所有像素点的均值矢量为
μ=(μi,μj)T=(L−1∑i=0L−1∑j=0ipi,j,L−1∑i=0L−1∑j=0jpi,j)T。 忽略远离灰度直方图主对角线的像素点,则ωB+ωC≈1,且μ≈ωBμB+ωCμC,定义类间离散度矩阵为
{{\mathit{\boldsymbol{S}}}} = {\omega _{\rm{B}}}{({\mu _{\rm{B}}} - \mu )^{\rm{T}}}({\mu _{\rm{B}}} - \mu ) \\ + {\omega _{\rm{C}}}{({\mu _{\rm{C}}} - \mu )^{\rm{T}}}({\mu _{\rm{C}}} - \mu )。 将离散度矩阵的迹作为两类区域的类间距离量函数,如式(9)所示:
{r_{{\rm{tr}}}}({{\mathit{\boldsymbol{S}}}}) = {\omega _{\rm{B}}}\left[ {{{({\mu _{{\rm{B}}i}} - {\mu _i})}^2} + {{({\mu _{{\rm{B}}j}} - {\mu _j})}^2}} \right] \\ + {\omega _{\rm{C}}}\left[ {{{({\mu _{{\rm{C}}i}} - {\mu _i})}^2} + {{({\mu _{{\rm{C}}j}} - {\mu _j})}^2}} \right]。 则最佳分割阈值为{r_{{\rm{tr}}}}({{\mathit{\boldsymbol{S}}}})取得最大值时所对应的(s,t)(其中{\rm{0}} \leqslant s,t \leqslant L - 1)。
传统2-Otsu算法虽然可以提高阈值选取的准确度和算法的抗噪性,但是其计算量较大,计算复杂度较高,实时性能较差。因此本文引入了改进萤火虫算法来对其进行优化。
3. 改进萤火虫算法(IFA)
3.1 基本萤火虫算法
萤火虫算法(FA)是利用自身的发光特性,在特定区域内寻找更明亮的萤火虫,在其吸引下向其移动,并进行位置更新。每个萤火虫的信息包括位置、亮度和相邻萤火虫之间的吸引度。
萤火虫亮度变化的高斯解析式表达式为
I = {I_0}{{\rm{e}}^{ - \gamma {R_j}^{\rm{2}}}}, 式中:{I_0}是最大亮度值,\gamma 为光强吸收系数,{R_j}为两个个体的间距。
吸引度表达式:
\beta (\gamma ) = {\beta _0}{{\rm{e}}^{ - \gamma R_j^2}}, 式中:{\beta _0}为最大吸引度,β0∈[0,1];\gamma 、{R_j}意义同上。
萤火虫的位置更新式为
{X_i}(t + 1) = {X_i}(t) + {\beta _0}{{\rm{e}}^{ - \gamma {R_j}}}(X{}_j(t) - {X_i}(t)) \\ + \alpha (rand - 1/2), 式中:{X_i}(t)和X{}_j(t)分别表示在第t次迭代时萤火虫i和萤火虫j的位置;\alpha 为步长因子,且α∈[0,1];rand \in \cup (0,1)为随机因子。
萤火虫算法是利用萤火虫优化过程来模拟搜索最优解的过程。每一个萤火虫代表了一个可行的解决方案,解决在空间中随机分布的问题。相应的荧光亮度来判别对应的适宜解是否良好,在相对吸引力的影响下,萤火虫的位置不断更新,寻找最优解。在基本萤火虫算法搜索模型中,如果在附近找到更亮的个体,萤火虫就会朝着更亮的萤火虫方向移动,但没有考虑到种群历史最佳位置的影响。假设一个萤火虫在附近找到一个更亮的萤火虫并朝它移动,但个体的移动路线偏离最优位置的方向,必然会降低收敛速度,容易陷入局部最优。本文在考虑种群历史最佳位置的影响下,提出了一种基于种群历史最佳位置影响的改进萤火虫算法。
3.2 基于种群历史最佳位置影响的改进萤火虫算法
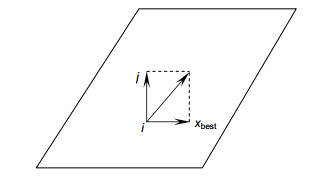
在使用萤火虫算法迭代搜索过程中,如果萤火虫i找到一个更明亮的萤火虫j时,萤火虫i会以一定的步长向j移动,但是运动方向会在种群历史最佳位置的影响下发生偏转,偏转方向为萤火虫i朝j方向和i朝种群历史最佳位置({x_{{\rm{best}}}})方向的合方向,这样每个搜索都得到了更好的解决,从而改善了收敛速度。受种群历史最佳位置影响的改进萤火虫算法的原理如图 2所示。假设在搜索范围内的任何萤火虫i都被明亮的萤火虫j所吸引,并受到种群历史最佳位置的影响。则萤火虫会朝最优方向移动,从而加快收敛速度。
萤火虫i在种群历史最佳位置的影响下的位置更新公式为
{x_i}(t + 1) = {x_i}(t) + {\beta _0} \cdot {{\rm{e}}^{ - \gamma R_j^2}} \cdot ({x_j}(t) - {x_i}(t)) \\ + {\beta _{\rm{0}}} \cdot {{\rm{e}}^{ - \gamma R_{{\rm{best}}}^2}} \cdot ({x_{{\rm{best}}}}(t) - {x_i}(t)) \\ + \alpha \cdot (rand - 1/2), 式中:{x_i}(t)为萤火虫的初始位置,{\beta _0} \cdot {{\rm{e}}^{ - \gamma R_j^2}} \cdot ({x_j}(t) - {x_i}(t))表示萤火虫在其他萤火虫的吸引下更新的位置,{\beta _{\rm{0}}} \cdot {{\rm{e}}^{ - \gamma R_{{\rm{best}}}^{\rm{2}}}} \cdot ({x_{{\rm{best}}}}(t) - {x_i}(t))表示萤火虫在历史最佳位置影响下更新的位置,\alpha (rand - 1/2)为随机步长项,可以有效的避免搜索结果陷入局部最优。
基于种群历史最佳位置影响的萤火虫算法既保持了基本萤火虫算法的搜索速度快、调节参数少、实现简单、鲁棒性能好等特性,又提高了算法精度,加快了收敛速度。因此本文引入了基于种群历史最佳位置影响的改进萤火虫算法。
3.3 IFA和2-Otsu阈值分割阴影去除方法的结合
提出了一种基于改进萤火虫优化算法的运动阴影去除算法,将IFA与2-Otsu算法相结合,从而实现用IFA对目标函数(9)求最佳解问题来代替2-Otsu算法的阈值(s,t)选取问题。
{H_{\max }} = {r_{{\rm{tr}}}}({{\mathit{\boldsymbol{S}}}}) = {\omega _{\rm{B}}}\left[ {{{({\mu _{{\rm{B}}i}} - {\mu _i})}^2} + {{({\mu _{{\rm{B}}j}} - {\mu _j})}^2}} \right] \\ + {\omega _{\rm{C}}}\left[ {{{({\mu _{{\rm{C}}i}} - {\mu _i})}^2} + {{({\mu _{{\rm{C}}j}} - {\mu _j})}^2}} \right], 当{r_{{\rm{tr}}}}({{\mathit{\boldsymbol{S}}}})取最大值时,{H_{\max }}为全局最优值。
将{r_{{\rm{tr}}}}({{\mathit{\boldsymbol{S}}}})作为萤火虫算法的目标函数,图像的最佳分割阈值为目标函数取最大时所对应的(s,t)。算法设有三个理想规则:1)萤火虫不分雌雄,萤火虫只会被亮度更强的其他个体吸引;2)吸引度与亮度成正比;3)萤火虫的亮度与搜索过程中的目标函数有关。
3.4 基于IFA阴影去除方法的步骤与流程
算法具体步骤如下:
1) 将m个萤火虫随机放置在搜索范围内,其中光强吸收系数为γ,最大吸引度为{\beta _0},最大迭代次数为T,随机步长因子为α,萤火虫的初始位置是随机分布的。
2) 计算萤火虫的荧光亮度。通过{r_{{\rm{tr}}}}({{\mathit{\boldsymbol{S}}}})计算萤火虫算法的目标函数值,并将其作为{I_0}结合到IFA中。
3) 更新萤火虫i的位置。萤火虫i不仅被一只更明亮的萤火虫所吸引,而且还受到种群历史最佳位置的影响,位置更新式为(13)。其中最亮的萤火虫会根据以下公式来更新自己的位置:
{x_{{\rm{best}}}}(t + 1) = {x_{{\rm{best}}}}(t) + \alpha \cdot (rand - 1/2), {x_{{\rm{best}}}}(t)是迭代t次时的全局最优位置。
4) 位置更新之后,采用{r_{{\rm{tr}}}}({{\mathit{\boldsymbol{S}}}})重新计算{I_0},并搜索区域内最亮的萤火虫,当目标值得到改进时对最优解进行更新,否则不变。
5) 当迭代次数达到T时,记录下Hbest,Hbest所对应的(s,t)即为最佳分割阈值。否则重复步骤3)~5)。
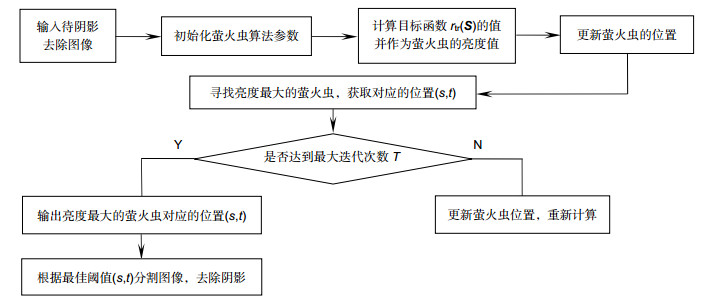
基于IFA的阴影去除算法流程图如图 3所示。
IFA的具体参数设置如下:
4. 实验结果及分析
实验采用的操作系统为Windows 7 64位,Intel(R) CoreTM i5-2410 CPU @2.3 GHz,4 GB内存笔记本电脑,运行环境为Matlab 7.12.0(R2011a)。
4.1 实验结果
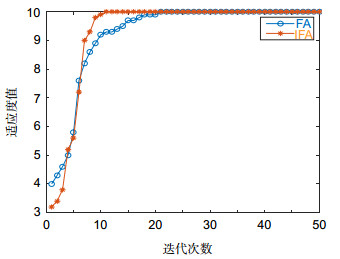
萤火虫算法和本文提出的改进萤火虫优化算法的迭代过程如图 4所示。
通过图 4可以看出,虽然两种算法最终都能寻优成功,但是萤火虫算法在迭代后期收敛速度明显较慢,需要迭代20次左右时目标函数才能处于稳定状态,才能寻优成功。而改进后的基于种群历史最佳位置影响的萤火虫算法在迭代10次左右时,目标函数基本达到了稳定状态,迭代10次后已经确定了最优值,说明IFA较FA寻优速度更快,更具有时效性。
为了有效评估本文方法的性能,分别采用2-Otsu法、PSO优化2-Otsu法[12]、FA优化2-Otsu法和本文改进萤火虫优化2-Otsu法对四组视频图像进行实验,运行结果如图 5~图 8所示。
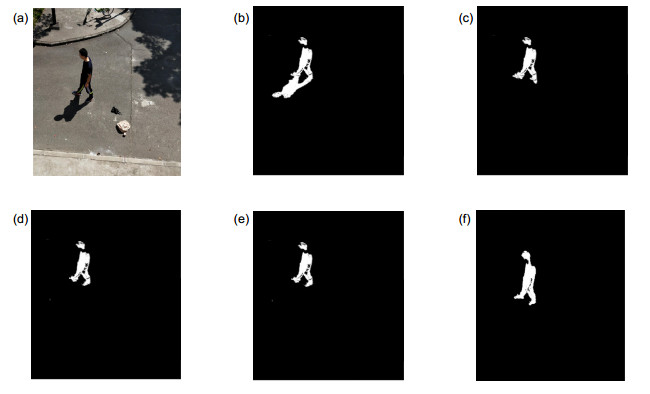
![图 5 Highway视频序列阴影去除效果图。(a)视频帧;(b)阴影去除前结果;(c)传统2-Otsu阴影去除结果;(d) PSO优化2-Otsu阴影去除结果;(e) FA优化2-Otsu阴影去除结果;(f) IFA优化2-Otsu阴影去除结果]() 图 5
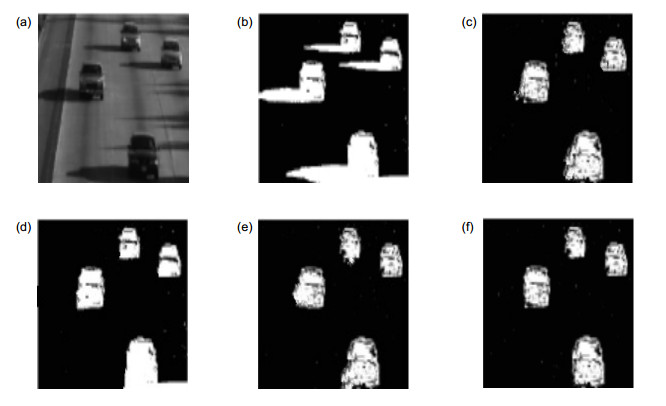
图 5Highway视频序列阴影去除效果图。(a)视频帧;(b)阴影去除前结果;(c)传统2-Otsu阴影去除结果;(d) PSO优化2-Otsu阴影去除结果;(e) FA优化2-Otsu阴影去除结果;(f) IFA优化2-Otsu阴影去除结果
Figure 5.Highway video sequence shadow removal effect diagram. (a) Video frame; (b) Result without shadow removal; (c) Shadow removal result of traditional 2-Otsu; (d) PSO optimized 2-Otsu shadow removal result; (e) FA optimized 2-Otsu shadow removal result; (f) IFA optimized 2-Otsu shadow removal result
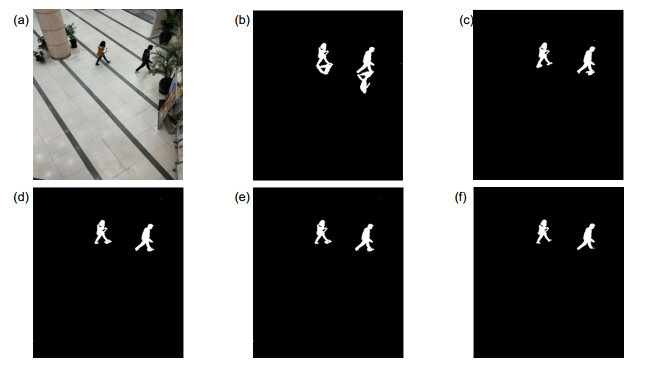
![图 6 Bungalows视频序列阴影去除效果图。(a)视频帧;(b)阴影去除前结果;(c)传统2-Otsu阴影去除结果;(d) PSO优化2-Otsu阴影去除结果;(e) FA优化2-Otsu阴影去除结果;(f) IFA优化2-Otsu阴影去除结果]() 图 6
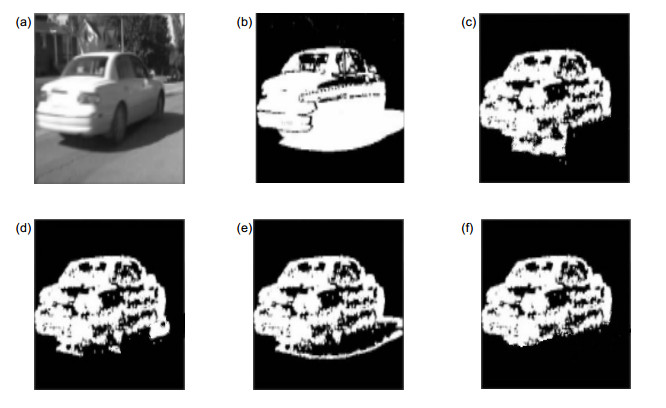
图 6Bungalows视频序列阴影去除效果图。(a)视频帧;(b)阴影去除前结果;(c)传统2-Otsu阴影去除结果;(d) PSO优化2-Otsu阴影去除结果;(e) FA优化2-Otsu阴影去除结果;(f) IFA优化2-Otsu阴影去除结果
Figure 6.Bungalows video sequence shadow removal effect diagram. (a) Video frame; (b) Result without shadow removal; (c) Shadow removal result of traditional 2-Otsu; (d) PSO optimized 2-Otsu shadow removal result; (e) FA optimized 2-Otsu shadow removal result; (f) IFA optimized 2-Otsu shadow removal result
![图 7 Outdoor视频序列阴影去除效果图。(a)视频帧;(b)阴影去除前结果;(c)传统2-Otsu阴影去除结果;(d) PSO优化2-Otsu阴影去除结果;(e) FA优化2-Otsu阴影去除结果;(f) IFA优化2-Otsu阴影去除结果]() 图 7
图 7Outdoor视频序列阴影去除效果图。(a)视频帧;(b)阴影去除前结果;(c)传统2-Otsu阴影去除结果;(d) PSO优化2-Otsu阴影去除结果;(e) FA优化2-Otsu阴影去除结果;(f) IFA优化2-Otsu阴影去除结果
Figure 7.Outdoor video sequence shadow removal effect diagram. (a) Video frame; (b) Result without shadow removal; (c) Shadow removal result of traditional 2-Otsu; (d) PSO optimized 2-Otsu shadow removal result; (e) FA optimized 2-Otsu shadow removal result; (f) IFA optimized 2-Otsu shadow removal result
![图 8 Indoor视频序列阴影去除效果图。(a)视频帧;(b)阴影去除前结果;(c)传统2-Otsu阴影去除结果;(d) PSO优化2-Otsu阴影去除结果;(e) FA优化2-Otsu阴影去除结果;(f) IFA优化2-Otsu阴影去除结果]() 图 8
图 8Indoor视频序列阴影去除效果图。(a)视频帧;(b)阴影去除前结果;(c)传统2-Otsu阴影去除结果;(d) PSO优化2-Otsu阴影去除结果;(e) FA优化2-Otsu阴影去除结果;(f) IFA优化2-Otsu阴影去除结果
Figure 8.Indoor video sequence shadow removal effect diagram. (a) Video frame; (b) Result without shadow removal; (c) Shadow removal result of traditional 2-Otsu; (d) PSO optimized 2-Otsu shadow removal result; (e) FA optimized 2-Otsu shadow removal result; (f) IFA optimized 2-Otsu shadow removal result
图 5、图 6、图 7和图 8分别为用四种不同算法在Highway、Bungalows、Outdoor和Indoor四种环境下的阴影去除结果。其中,图(a)均为彩色视频图像,图(b)为包含阴影的前景目标。从图(b)中可以看出结果中含有大量的运动阴影区域,并且这些区域与前景目标相连,导致目标形变和扭曲。分别采用传统2-Otsu法、PSO优化2-Otsu法、FA优化2-Otsu法和本文IFA优化2-Otsu法选取最优分割阈值,去除了阴影,最后得到不含阴影的目标图像(c)、(d)、(e)、(f)。由图中可以看出,与目标相连的阴影区域得到了较好的去除,大部分运动阴影都被从前景目标中剔除。对比阴影去除结果图,可以看出,本文算法阴影去除效果最佳,既成功去除了阴影,又保持了目标的完整性。
4.2 实验分析
4.2.1 不同参数对算法性能的影响分析
针对Indoor图,只有实验对比的参数变动,其他参数仍为表 1设置的值,种群规模、步长因子α和光强度系数γ的不同设置对分割结果和运行速度的影响的实验如表 2、表 3。
参数名 值 最大吸引度β0 1 随机步长因子α 0.5 萤火虫的个数m 50 最大迭代次数T 50 种群规模 迭代次数 分割阈值 运行时间/s 30 50 (124, 144) 0.46 50 50 (135, 149) 0.51 70 50 (134, 148) 0.65 α γ 分割阈值 运行时间/s 0.4 1 (131, 153) 0.54 0.5 1 (135, 149) 0.51 0.6 1 (143, 158) 0.52 由表 2和表 3可知,种群规模、步长因子α和光强度系数γ的不同设置会对分割结果和运行速度有一定的影响,但综合来看本文选取的改进萤火虫算法的参数较优。
4.2.2 分割阈值对比
四种算法分割阈值对比如表 4所示,从表中可知,本文算法分割阈值小于其他三种算法,由于采用了基于种群历史最佳位置影响的萤火虫算法对2-Otsu进行优化,不易陷入局部最优,能精准找到最佳阈值,这样可避免因阈值过高,把部分较亮的阴影区域误分到目标区域中。
视频序列 2-Otsu法 PSO优化
2-Otsu法FA优化
2-Otsu法本文IFA优化
2-Otsu法Highway (127, 106) (147, 129) (124, 102) (122, 101) Bungalows (132, 109) (134, 108) (125, 99) (121, 97) Outdoor (78, 88) (79, 90) (76, 85) (75, 84) Indoor (138, 156) (140, 158) (136, 151) (135, 149) 4.2.3 区域一致性对比
区域一致性反映了算法对图像的分割效果,在同一类别区域内,像素相似度越大,表明一致性越好,分割效果越佳。采用本文IFA优化2-Otsu算法分割后的图像,区域一致性均优于其他三种算法,分割效果较佳,如图 9所示。
4.2.4 阴影检测率和阴影识别率对比
本文使用阴影检测率\eta 和阴影识别率\varepsilon [20]对算法进行定量分析,其定义为
\eta = \frac{{T{P_{\rm{S}}}}}{{T{P_{\rm{S}}} + F{N_{\rm{S}}}}}, \varepsilon = \frac{{\overline {T{P_{\rm{F}}}} }}{{T{P_{\rm{F}}} + F{N_{\rm{F}}}}}, 式中:下标F表示前景像素,S表示阴影像素,T{P_{\rm{S}}}表示正确检测出S的数量,F{N_{\rm{S}}}表示把S误检为F的数量,T{P_{\rm{F}}}表示正确检测出F的数量,F{N_{\rm{F}}}表示F被误检为S的数量,\overline {T{P_{\rm{F}}}} 表示不包含阴影时的F数量。
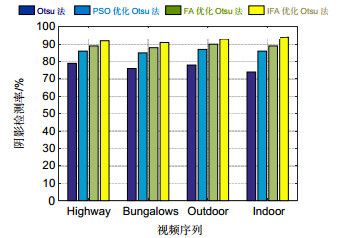
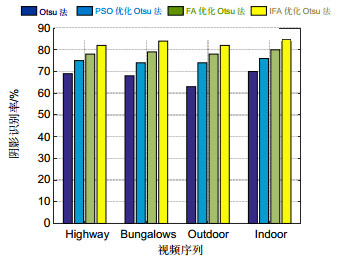
如图 10、图 11所示为分别采用2-Otsu法、PSO优化2-Otsu法、萤火虫优化2-Otsu法及本文改进萤火虫优化2-Otsu法对四段视频处理的阴影检测率及识别率对比。
![图 11 不同算法阴影识别率对比]() 图 11
图 11不同算法阴影识别率对比
Figure 11.Comparison of shadow recognition rate of different algorithms
通过对比可见,本文所提算法较其他几种方法阴影检测率和阴影识别率均有所提升,采用本文算法效果较佳。
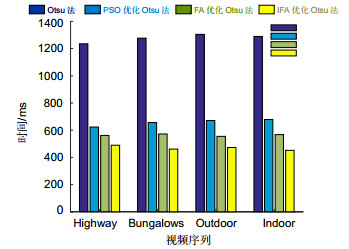
4.2.5 分割阈值用时对比
不同算法计算分割阈值用时对比如图 12所示,由图 12可知,本文算法用时较其他三种方法分别快2.69倍,1.42倍,1.21倍。这是因为改进后的基于种群历史最佳位置影响的萤火虫算法加快了搜索最优解的收敛速度。由此可知,本文算法既提高了图像的分割精度,又减少了算法的运行时间。
![图 12 不同算法计算分割阈值用时对比]() 图 12
图 12不同算法计算分割阈值用时对比
Figure 12.Time comparison of different algorithms for calculating segmentation threshold
5. 结论
在本文中,考虑到运动阴影会导致运动目标前景发生改变,影响运动目标的进一步分析,提出了一种基于改进萤火虫优化算法的运动阴影去除算法。改进的萤火虫算法不仅参数少、操作简单、稳定性好、全局优化效果好,并且具有更快的收敛速度。通过改进的萤火虫算法解决了2-Otsu法计算量大、计算复杂度高、实时性能差等问题。与其他三种阴影去除算法相比,本文算法在用时、区域一致性、阴影检测效率、检测精度和保持目标完整性等方面均得到有效提高。实验证明,本文算法提高了阴影去除效果和算法运行速度。
-
参考文献
Zheng L X, Ruan X Y, Chen Y B, et al. Shadow removal for pedestrian detection and tracking in indoor environments[J]. Multimedia Tools and Applications, 2017, 76(18): 18321-18337.
DOI: 10.1007/s11042-016-3880-6Yang W D, Guo W, Peng K, et al. Research on removing shadow in workpiece image based on homomorphic filtering[J]. Procedia Engineering, 2012, 29: 2360-2364.
DOI: 10.1016/j.proeng.2012.01.315Vicente T F Y, Hoai M, Samaras D. Leave-one-out kernel optimization for shadow detection and removal[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(3): 682-695.
DOI: 10.1109/TPAMI.2017.2691703Zhou Y H, Sun L, Zhang J B. A shadow elimination method based on color and texture[C]//Proceedings of 2010 IEEE International Conference on Intelligent Computing and Intelligent Systems, Xiamen, China, 2010: 8-11.
展开 -
版权信息
版权属于中国科学院光电技术研究所,但文章内容可以在本网站免费下载,以及免费用于学习和科研工作 -
关于本文
引用本文
Citation:刘磊, 曹民, 张晓. 改进萤火虫优化算法在运动阴影去除方面的应用[J]. 光电工程, 2019, 46(4): 180120. DOI: 10.12086/oee.2019.180120Citation:Liu Lei, Cao Min, Zhang Xiao. Application of improved firefly optimization algorithm in motion shadow removal. Opto-Electronic Engineering 46, 180120 (2019). DOI: 10.12086/oee.2019.180120导出引用出版历程
- 收稿日期 2018-03-12
- 修回日期 2018-12-20
- 刊出日期 2019-03-31
文章计量
访问数(18811) PDF下载数(2526)
- 18811 访问数
- 2526 下载数
- 3 引用数
 下载:
下载:

 百度学术
百度学术




