E-mail Alert
E-mail Alert RSS
RSS-
摘要
针对某星载激光通信中光电跟瞄系统的反射镜组件进行研究,对比了三种柔性支撑方案,结合空间载荷实际应用情景综合评估结构的刚度优势和面形精度。分析结果表明,颈口侧壁开槽的柔性支撑方案在重力和温度变化影响下的面形精度(RMS)可达2.05 nm和8.88 nm,基频模态为926.1 Hz,在保证面形精度的柔性要求与高刚度抵御振动损坏的平衡中,这种柔性设计方案最为合理。进一步完成了柔性支撑结构的参数优化设计并进行了动力学分析,频率响应下应力最大值为96 MPa,小于材料的抗拉强度极限;随机振动分析结果表明,反射镜加速度响应均方根为11.14 g RMS,并满足3σ准则。文章最后通过0.2 g正弦扫频试验,验证了有限元模态分析相对误差为2.4%。实验结果表明,分析结果基本准确可靠,柔性环节设计可靠,满足使用要求。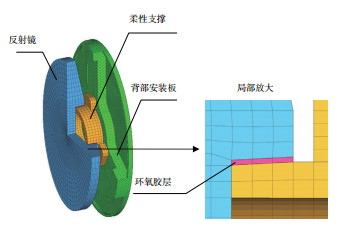
Abstract
The mirror assembly of an electro-optical tracking and pointing system for a space borne laser communication system is studied, three flexible supports are contrasted, according to practical applications of space load, the structural stiffness advantage and surface figure of the three flexible support scheme have been evaluated. The analysis results show that the surface figure RMS of neck side grooving flexible support scheme resisting microgravity and thermal environment change can reach 2.05 nm and 8.88 nm, the fundamental frequency mode is 926.1 Hz, in the balance between the surface figure RMS and the higher stiffness resisting hevibration damage, the flexible design is most reasonable. On this basis, the parameterized design of the flexible support structure of the reflector is completed and dynamic analysis have been done. The maximum stress of the frequency response is 96 Mpa, which is less than the material's tensile strength limit. The results of random vibration analysis show that root mean square of acceleration response is 11.14 g RMS, meeting 3σ law. Finally, a 0.2 g sine sweeptest proves that the relative error of the modal analysis is 2%, the experimental result show that the analysis results are basically accurate and reliable, that is, flexible support design is reliable to meet the requirements of use.
-
1. 引言
星载激光通信光电跟瞄系统常用的粗跟踪转台结构形式主要有万向架式结构、周扫望远镜式结构和单反射镜式结构。其中周扫望远镜式结构是一种大角度伺服的跟踪转台结构形式,系统利用两块法线相互垂直的反射镜组,通过潜望式周扫转台的方位和俯仰轴系的二维转动,带动反射镜的旋转实现了对光轴的二维调整。周扫望远镜式跟瞄转台光路经过两次反射,反射环节多,所以对于反射镜组件在抵御重力和温度变化时面形精度要求高,并且由于卫星载荷在火箭飞行过程中的跨音速飞行、级间段分离会产生低频振动,以及气动噪声和喷流噪声等的动力学环境,对于反射镜组件的动态刚度也有较高要求。国内外学者经过研究发现,在支撑结构中设置一定程度的柔性环节能有效改善反射镜组件在重力工况下的面形精度,同时反射镜的结构刚度仍然可以在一定程度上得以保证[1-4]。因此,柔性支撑结构在空间载荷的设计中得到了大量的应用。
Paros和Weisbord等在1965年推算出了圆弧形柔性铰链支撑刚度的计算公式[5],Smith等在1997年针对椭圆形柔性铰链支撑刚度进行了详细的研究[6]。国内陈贵敏在Smith研究基础上,提出了深切口椭圆柔性铰链支撑,推算出了这类柔性铰链的转动刚度的计算公式并进行了分析和实验验证[7];电子科大的左行勇等推算出了弓形柔性铰链、倒圆角直梁形柔性铰链和椭圆形柔性铰链这三种柔性铰链的刚度与设计参数之间的关系[8]。中国科学院长春光机所李宗轩等针对大口径空间反射镜提出了一种Cartwheel型柔性支撑设计方法[9];长春光机所李行等针对空间反射镜提出了一种在柔性支撑底部安装面开圆弧形支撑结构,并且对这种柔性支撑结构的关键尺寸参数进行了优化,这种结构从原理上十分接近理想球铰。通过上述国内外研究的现状可见,柔性支撑是一种常用且有效的保证反射镜的面形精度的设计方式。本文在上述国内外研究成果的基础上,对比了颈口侧壁开槽柔性支撑结构,颈口环形切槽柔性支撑形式以及底面直线切槽柔性支撑形式在抵抗重力释放下的面形精度,以及各自动态刚度特性,综合实际装配情况设计出最为合理的反射镜组件,最终通过正弦扫描振动实验验证分析的准确性。
2. 反射镜组柔性支撑结构设计与分析
2.1 反射镜组件结构设计
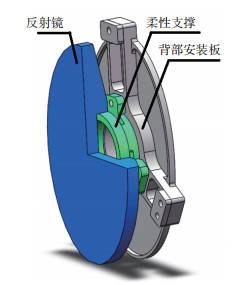
反射镜材料选定为热膨胀系数极小的微晶玻璃(Zerodure)制成;柔性支撑选用铟钢(4J32)材料,其热膨胀系数与反射镜材料微晶的膨胀系数基本相同,使得反射镜的热稳定性能良好;椭圆背部安装板选用钛合金材料,至此完成了反射镜心中定位支撑结构设计。
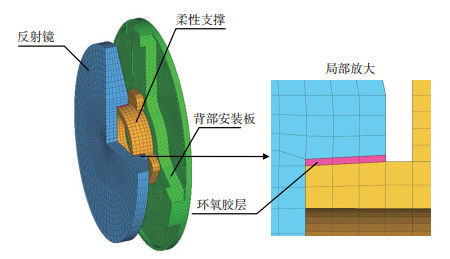
本文设计的反射镜组件由反射镜、柔性支撑衬套以及椭圆背部安装板组成,如图 1所示。其中反射镜呈椭圆型,其中长边直径为104 mm,短边直径为74 mm,反射镜采用中心支撑方式,通过粘接方式与柔性支撑衬套相连接。柔性支撑衬套颈口侧壁开柔性槽,柔性支撑衬套与椭圆背部安装板通过螺钉连接。
2.2 反射镜柔性支撑方案
为了保证光电跟瞄系统捕获和跟踪精度,反射镜组必须保证良好的动态刚度以确保光电跟瞄系统不会因为外界扰动而产生抖动。因为光电跟瞄系统在轨工作时会受到温度变化以及自重引力的影响,所以需对反射镜组进行模态以及反射镜面形精度进行分析。
![图 2 三种柔性支撑衬套结构示意图。(a)底面直线开槽;(b)颈口侧壁开槽;(c)颈口环形深切槽]() 图 2
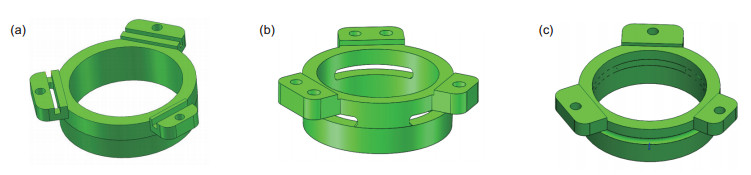
图 2三种柔性支撑衬套结构示意图。(a)底面直线开槽;(b)颈口侧壁开槽;(c)颈口环形深切槽
Figure 2.Diagram of three kinds of flexible support bushing. (a) Underside grooving flexible support; (b) Neck side grooving flexible support; (c) Neck side ring grooving flexible support
本文尝试三种柔性支撑衬套方案,均采用在衬套的局部区域开槽口,并保证三种方案的柔性支槽口的宽度相同,以便数据对比。第一种是在柔性支撑衬套的三个安装面上开直线槽口,增加结构的柔性,这种结构可以有效降低温度变化或重力释放影响下背板拉动衬套发生的或凹或凸的应变带来的反射镜面形误差,该方案的柔性支撑槽口宽度为2 mm,切槽深度为2.5 mm,质量为0.039 kg,如图 2(a)所示;第二种是在柔性支撑衬套的颈口侧壁处开槽,这种结构主要为了减小温度变化或重力释放影响下产生的扭转与剪切应变带来的反射镜面形误差。该方案的槽口宽度为2 mm,切槽圆心角b=0.87 rad,质量为0.039 kg,如图 2(b)所示;第三种是柔性支撑衬套的侧壁处开环形深切槽,这种结构在原理上接近球铰支撑结构,实现轴向转动,使得柔节具有三维转动柔性。该方案的槽口宽度为2 mm,整周环形切槽,质量为0.04 kg,如图 2(c)所示。
空间反射镜对于低频振动环境下的动载荷稳定性要求较高,为了保证反射镜组件动载荷较高的稳定性,反射镜的固结就需要增加预紧力。但是由于空间环境微重力的释放,预紧力的存在又促使结构应力的释放难以控制,镜面面形容易受到较大影响[10]。试图设计一种柔性支撑衬套,既能保证动载荷下的结构刚度,又能保证较好的面形精度。
2.3 三种柔性支撑方案面形误差与模态分析对比
模态频率 底面直线开槽 颈口侧壁开槽 颈口环形深切槽 一阶频率/Hz 1097.4 926.1 793.4 二阶频率/Hz 1653.5 1521.4 1493.8 三阶频率/Hz 1882.6 1702.9 1676.8 ![图 4 重力影响下反射镜刚体位移云图]() 图 4
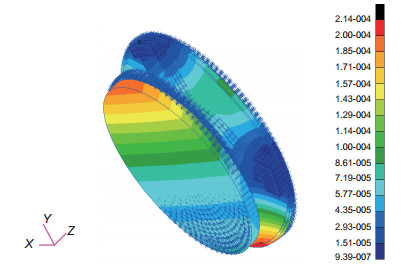
图 4重力影响下反射镜刚体位移云图
Figure 4.Rigid body displacement nephograrn of reflector subassembly under gravity
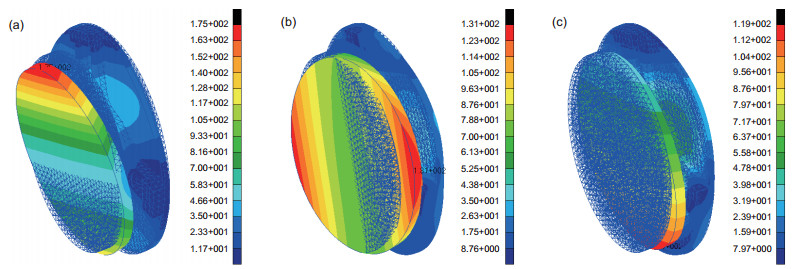
表 3为底面直线开槽、颈口侧壁开槽以及颈口环形深切槽柔性支撑衬套结构的反射镜组件模态分析结果。通过对三组模态频率的对比可知,底面直线开槽支撑方案的反射镜组件基频最高,值为1097.4 Hz,即动态刚度最佳;颈口环形深切槽支撑方案动态刚度下降较明显;颈口侧壁开槽支撑方案的反射镜组件一阶频率为926.1 Hz,相较于底面直线开槽柔性支撑结构,动态刚度下降不大,下降的原因从图 6的前三阶频率振型可知,这种柔性结构释放了“倾覆”、“偏摆”、“绕动”的空间自由度,而要使得面形精度较高就恰恰需要释放这三个空间自由度,那么这就是一个矛盾点。综合三种结构的平衡效果,颈口侧壁开槽支撑方案效果最佳,既保证了重力释放影响下良好的面形精度,又使得反射镜组件具有较高的动载刚度,故下文主要针对颈口侧壁开槽柔性支撑结构进行进一步的研究和分析。
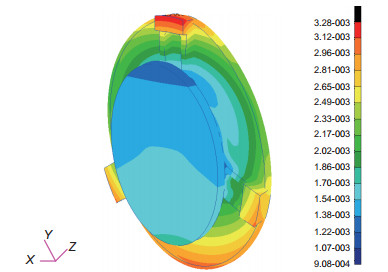
弹性模量/GPa 密度/(g·cm-3) 柏松比 线膨胀系数/(10-6·℃-1) 微晶玻璃 90.6 2.52 0.24 0.1 铟钢 141 8.05 0.36 0.038 钛合金 114 4.43 0.31 8.9 环氧胶 0.696 1.22 0.45 236 反射镜在轨工作期间,受到微重力以及温度变化环境的影响,需要考察反射镜组件在反射面法线与水平呈45°夹角安装状态下重力释放,以及5 ℃温度变化影响下的刚体位移,通过热变形有限元分析方法得到反射镜组件在重力和温度变化影响下的刚体位移云图如图 4、图 5所示,提取反射镜镜面节点云的刚体位移数据拟合三种支撑方案下的反射面的面形误差,分析结果如表 2所示。
![图 6 反射镜前三阶模态振型。(a)一阶模态振型;(b)二阶模态振型图;(c)三阶模态振型]() 图 6
图 6反射镜前三阶模态振型。(a)一阶模态振型;(b)二阶模态振型图;(c)三阶模态振型
Figure 6.The first 3th order modal of the mirror subassembly. (a) 1st order modal shape; (b) 2nd order modal shape; (c) 3rd order modal shape
对比三种柔性支撑方案的面形误差结果,相比于底面直线开槽孔柔性支撑结构,颈口侧壁开槽与颈口环形切槽支撑结构在重力影响下的面形精度(RMS)分别提升了10.5%、26.7%;温度变化ΔT=5℃作用下面形精度(RMS)分别提升了36.8%、8.5%。可见在侧壁开槽方式能够明显改善反射镜在微重力和温度变化影响下的面形精度。这种结果出现的原因在于重力释放和温度变化影响下背板拉动衬套导致反射镜发生趋于“前倾”的形变,如图 4、图 5所示,而底面直线开槽结构针对或凹或凸的变形趋势有明显的改善效果,但是对于“前倾”趋势的形变而言柔性效果并不明显;而颈口侧壁开槽可以有效地释放反射镜45°安装下重力以及温度变化引起的“前倾”剪切应力,提升了面形精度。
为了分析反射镜组件的面形精度与动态特性,在MSC Patran中对反射镜组建立有限元模型如图 3所示。反射镜组件共划分了6707个六面体单元,反射镜面共858个节点用于分析面形精度。该星载光端机反射镜采用微晶材料(Zerodur),柔性支撑衬套选用铟钢(4J32)材料,椭圆背部安装板选用钛合金(TC4),各材料的材料属性如表 1所示。
![图 5 温度变化时反射镜组件刚体位移云图]() 图 5
图 5温度变化时反射镜组件刚体位移云图
Figure 5.Rigid body displacement nephograrn of reflector subassembly under temperature variation
支撑方案 重力释放下的面形误差/nm ΔT=5℃温度变化下的面形误差/nm PV RMS PV RMS 底面直线开槽 11.4 2.29 63.12 14.06 颈口侧壁开槽 9.21 2.05 39.14 8.88 颈口环形深切槽 7.66 1.68 43.02 12.88 2.4 颈口侧壁开槽柔性结构参数设计
![图 7 颈口侧壁开槽柔性支撑结构主要设计参数示意图]() 图 7
图 7颈口侧壁开槽柔性支撑结构主要设计参数示意图
Figure 7.Main design parameter diagram of flexible support structure of neck side grooving flexible support
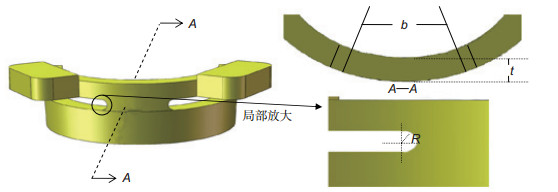
依据文献[11]可知,柔性支撑结构的刚度随着厚度t的变化呈现平方规律变化;切槽槽宽2R≤2 mm时,支撑结构的刚度对切槽槽宽2R变化敏感,R值越大柔性效果越明显,但是对于文中讨论的柔性支撑的尺寸限制了开槽宽度最大即2 mm。根据上述规律在设计柔性支撑结构参数时,首先依据加工工艺确定R的尺寸参数,然后通过有限元法分析不同b值的反射镜组件的刚度,经过反复迭代最终使得结构满足刚度需求的稳定性要求。根据文献[8]计算出的转动刚度与各参数之间的关系,最终确定柔性铰链的各参数的值:R=1 mm,b=0.94 rad,t=3.5 mm。
柔性支撑结构卸载外力的基本原理均基于柔性铰链,柔性环节位于支撑结构的不同位置对于支撑结构的刚度也会产生不同的效果,所以需要分析柔性支撑的关重尺寸参数在外力作用下的刚度。颈口侧壁开槽柔性支撑结构的几何尺寸包括切槽槽宽2R、切槽圆心角b、柔性铰链最薄处t,各参数如图 7所示。
3. 颈口侧壁开槽支撑方案动力学分析
3.1 正弦激励下的频率响应分析
条件参数 数值 频率范围/Hz 10~2000 振级/g 1 扫描速率oct/min 4 加载方向 Z向 ![图 10 柔性支撑频率响应等效应力云图]() 图 10
图 10柔性支撑频率响应等效应力云图
Figure 10.Frequency response equivalent stress nephogram of flexible support
频率响应分析目的在于验证颈口侧壁开槽柔性支撑方案下的反射镜组件的动载荷刚度可靠性,预判在简谐振动载荷下的结构强度是否足够,通过频率响应分析能够预知结构的持续动力特性,验证结构的设计是否合理,以避免结构在承受正弦载荷时失效[12-13]。正弦振动分析条件如表 4所示,计算中阻尼系数取0.05。
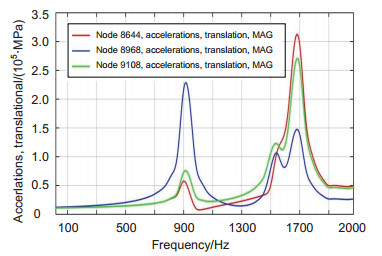
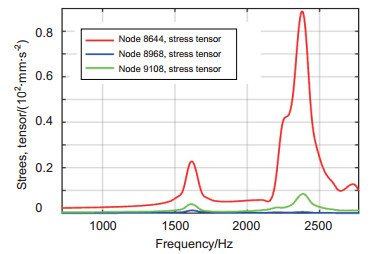
响应输出点分别取柔性支撑衬套颈口侧壁开槽的槽口处节点(Node 8644)、镜面边缘节点(Node 9108)、镜面中心节点(Node 8968),其加速度响应曲线和应力响应曲线如图 8和图 9所示。
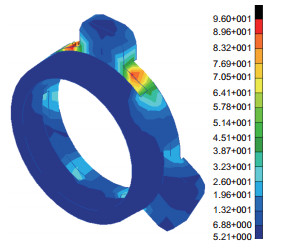
从频率响应下的柔性支撑等效应力云图 10可以看出,应力最大值为96 MPa,铟钢的抗拉强度极限为σb=514 MPa,能够满足刚度和强度要求,所以该结构能承受反射镜在发射中的正弦环境引起的振动损伤。
由图 8可知:在正弦激励下,反射镜组件在频率为913 Hz时在产生共振,振幅最大;静态下的模态分析共振频率为926.1 Hz,和正弦振动的结果分别相差3.5%。正弦振动的结果也进一步验证了模态分析的正确性。
3.2 正弦激励下的频率响应分析
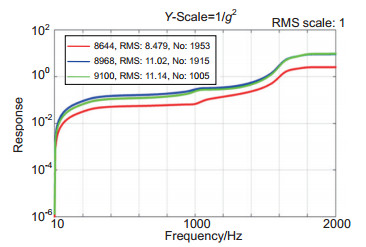
![图 12 速度响应累积均方根值(CRMS)]() 图 12
图 12速度响应累积均方根值(CRMS)
Figure 12.Cumulative root mean square (CRMS) of the acceleration response
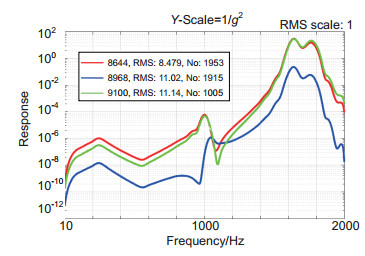
评估反射镜组件在随机振动载荷下是否产生残余变形或损坏,可依据3σ准则作为评估标准[14],即依据输入的功率谱密度曲线计算输入累计均方根GRMSin,通过有限元频率响应分析计算被考核结构上响应输出观察点的响应均方根值GRMSout,若GRMSout/GRMSin<3认为结构是可靠安全的[14]。为了评估柔性支撑的动态结构刚度,取柔性支撑衬套颈口侧壁开槽的槽口处节点(Node 8644)、镜面边缘节点(Node 9108)、镜面中心节点(Node 8968)三个代表性节点作为响应输出观察点,通过频率响应分析计算出各观察点的加速度响应均方根,根据3σ准则判断柔性支撑结构设计的动态刚度是否可靠。图 11、图 12为各取样点的加速度响应PSD曲线与累积均方根值(cumulative RMS,CRMS)。
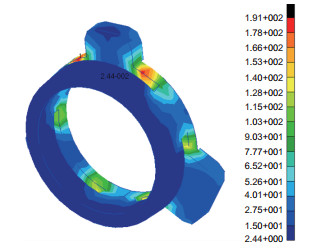
![图 13 随机振动下的柔性支撑等效应力云图]() 图 13
图 13随机振动下的柔性支撑等效应力云图
Figure 13.Random vibration response equivalent stress nephogram of flexible support
从分析结果可以看出,加速度响应均方根为11.14 g RMS,放大倍数为2.86倍,即加速度响应均方根值小于3倍输入均方根值,满足3σ准则。图 13为随机振动载荷下柔性支撑的等效应力云图,从分析结果可知最大应力值为191 MPa,而铟钢合金的抗拉强度极限σb为541.0 MPa,即柔性支撑结构设计可靠,满足强度与刚度安全要求。
频率范围/Hz 鉴定级 总均方根加速度 加载方向 10~150 +3 dB/oct 3.89 g RMS X、Y和Z向 150~600 0.016 g2/Hz 600~2000 -6 dB/oct ![图 11 加速度响应功率谱密度(PSD)]() 图 11
图 11加速度响应功率谱密度(PSD)
Figure 11.Power spectrum density (PSD) of the acceleration response
将随机载荷的功率谱密度(power spectral densit,PSD)作为随机振动分析的输入条件如表 5所示。
4. 实验验证
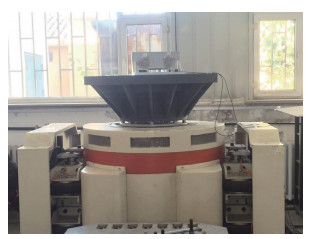
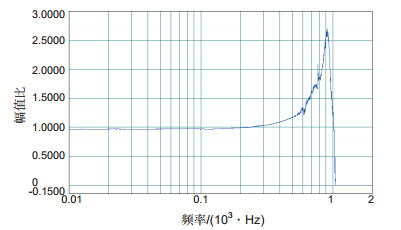
通过0.2 g正弦扫频试验来验证反射镜柔性支撑结构刚度的可靠性,反射镜组件实物如图 16所示,图 17为Z向正弦扫描振动实验装置,该实验同时验证了有限元模型和分析的准确。在反射镜组件背板安装传感器,该测点的响应曲线如图 18所示。
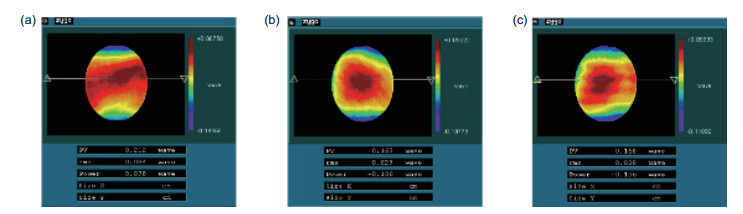
![图 15 不同温度下反射镜面形检测结果]() 图 15
图 15不同温度下反射镜面形检测结果
Figure 15.Results of reflector subassembly surface shape testing at different temperatures
根据正弦扫频试验可以得出,分析中有限元模型比较接近实际情况,分析结果相对准确。
由图 18响应曲线可知,主镜组件Z向一阶自然频率为904.3 Hz,与模态分析结果的相对误差为2.4%。
使用ZYGO激光干涉仪分别在(20±5) ℃环境温度下对反射镜组件面形进行检测,检测系统如图 14所示。图 15(a)~15(c)为不同温度下摆镜面形的检测结果。当环境温度为15 ℃,面形均方根值(RMS)为0.034λ,如图 15(a)所示。当环境温度为20 ℃,面形均方根值(RMS)为0.029λ,如图 15(b)所示。当环境温度为25 ℃,面形均方根值(RMS)为0.03λ,如图 15(c)所示。可以满足激光通信光学天线对于反射镜面形指标的要求。
5. 结论
本文针对某星载的反射镜组件进行研究,设计了一种颈口侧壁开槽柔性支撑结构,使之在原理上接近球铰支撑,且相较于底面直线开槽孔与颈口环形切槽柔性支撑结构,颈口侧壁开槽支撑结构在微重力以及ΔT=5℃作用下,反射镜面形精度RMS值分别为2.05 nm,8.88 nm,反射镜组件一阶频率为926.1 Hz,即该结构能够获得较为理想的支撑刚度以及面形精度。在此基础上,完成了反射镜柔性支撑结构的参数化设计,随后对参数优化设计后的反射镜组件进行了试验前的动态刚度预判分析,重点分析了发射镜组件中相对比较薄弱的柔性支撑上的应力响应情况,对其是否会在正弦振动与随机振动中发生破坏或塑性变形给出了的结论。最终通过试验结果表明预示分析结果与试验结果基本相符。
-
参考文献
李行, 徐振邦, 李静秋.空间反射镜新型柔性支撑结构设计[J].电子测量技术, 2014, 37(8): 1-6.
http://kns.cnki.net/KCMS/detail/detail.aspx?filename=dzcl201408001&dbname=CJFD&dbcode=CJFQLi X, Xu Z B, Li J Q. Design of new flexure hinge support of space reflector subassembly[J]. Electronic Measurement Technology, 2014, 37(8): 1-6.
http://kns.cnki.net/KCMS/detail/detail.aspx?filename=dzcl201408001&dbname=CJFD&dbcode=CJFQSchaffer C B, Jamison A O, Mazur E. Morphology of femtosecond laser-induced structural changes in bulk transparent materials[J]. Applied Physics Letters, 2004, 84(9): 1441-1443.
DOI: 10.1063/1.1650876Liu M, Zhang X M, Fatikow S. Design and analysis of a multi-notched flexure hinge for compliant mechanisms[J]. Precision Engineering, 2017, 48: 292-304.
DOI: 10.1016/j.precisioneng.2016.12.012Du Z J, Yang M, Dong W, et al. Static deformation modeling and analysis of flexure hinges made of a shape memory alloy[J]. Smart Materials and Structures, 2016, 25(11) : 158-163.
DOI: 10.1088/0964-1726/25/11/115029展开 -
期刊类型引用(13)
1. 刘朋朋,吴俊,常君磊,庞寿成,邹宝成,张祝伟. 长条镜柔性支撑及点阵结构设计方法. 光学学报. 2024(02): 280-289 .  百度学术
百度学术
2. 周国清,高轲,吴金煌,宋乃回,贾国帅,周祥,徐嘉盛. 激光雷达主反射镜支撑结构设计与实现. 激光与光电子学进展. 2024(17): 325-334 . 百度学术
3. 高奔,王劲松,王浩,孙熙函,王奕博. 离轴反射式平行光管结构设计及主镜背部柔性支撑仿真分析. 光学技术. 2023(03): 286-292 . 百度学术
4. 杜伟峰,张惠,高文杰,唐行菊,陆建. 旋转平行光管主镜背部柔性支撑设计与仿真分析. 光学技术. 2021(01): 23-27 . 百度学术
5. 李响,白东伟,孟立新,高亮,安岩. 空间碎片探测与测距复合系统光学望远镜. 红外与激光工程. 2021(07): 247-256 . 百度学术
6. 王朋朋,辛宏伟,朱俊青,王永宪,沙巍,陈长征. 长条反射镜及柔节的参数优化设计. 红外与激光工程. 2021(08): 245-250 . 百度学术
7. 杜伟峰,刘永志,高文杰,胡雄超. 空基跟踪平台变焦镜头光机热集成分析. 激光与红外. 2020(05): 615-622 . 百度学术
8. 习兴华,张超杰,胡海飞,关英俊. 超大口径弯月镜支撑点布局-刚度-校正力联合优化. 光电工程. 2020(08): 93-100 . 本站查看
9. 徐超,彭小强,戴一帆. 复杂曲面铝反射镜超精密制造现状. 光电工程. 2020(08): 31-42 . 本站查看
10. 李猛,闫钰峰,白素平. 机载光谱仪前置光学系统主镜支撑结构设计. 长春理工大学学报(自然科学版). 2020(05): 62-67 . 百度学术
11. 王文攀,吕天宇,刘祥意,范磊. 中小型球面反射镜柔性支撑优化设计. 长春理工大学学报(自然科学版). 2019(03): 7-10 . 百度学术
12. 邢明慧,李健军,翟文超,汤琪,郑小兵. 基于有限元分析的小口径离轴抛物面反射镜支撑结构设计. 应用光学. 2019(06): 1160-1166 . 百度学术
13. 杨丰福,田海英,颜昌翔,吴从均,母德强. Athermal design of the mirror support with flexure hinges for the laser communication terminal. Optoelectronics Letters. 2019(06): 454-458 . 百度学术
其他类型引用(11)
-
版权信息
版权属于中国科学院光电技术研究所,但文章内容可以在本网站免费下载,以及免费用于学习和科研工作 -
关于本文
引用本文
Citation:柳鸣, 张立中, 李响, 李小明, 张家齐, 孟立新, 刘俊杰. 空间轻小型反射镜柔性支撑设计与动力学分析[J]. 光电工程, 2018, 45(5): 170686. DOI: 10.12086/oee.2018.170686Citation:Liu Ming, Zhang Lizhong, Li Xiang, Li Xiaoming, Zhang Jiaqi, Meng Lixin, Liu Junjie. Design of flexure support of space compact reflector subassembly and dynamic analysis. Opto-Electronic Engineering 45, 170686 (2018). DOI: 10.12086/oee.2018.170686导出引用出版历程
- 收稿日期 2017-12-12
- 修回日期 2018-02-10
- 刊出日期 2018-04-30
文章计量
访问数(10741) PDF下载数(3761)
- 10741 访问数
- 3761 下载数
- 24 引用数
 下载:
下载: