
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Yuan Xiaobo, Zhang Chao. An on-orbit calibration model for wide field of view star sensor based on the vector observations[J]. Opto-Electronic Engineering, 2017, 44(5): 505-510. doi: 10.3969/j.issn.1003-501X.2017.05.005

|
An on-orbit calibration model for wide field of view star sensor based on the vector observations
-
Abstract
Focused on the on-orbit calibration problem of the wide field of view star sensor, a novel calibration model based on vector observations is proposed. The model uses 3 Rodrigues parameters, instead of Euler angles, as the exterior parameters to simplify the calculation, and complete the joint solution with intrinsic parameters and third order distortion parameters. Simulation shows that it has a higher accuracy than the traditional model with Euler angles. In case of a standard deviation of 0.05 pixels star point error, the model can still accurately calculate the camera parameters and the angle error after calibration is 0.483 arcsecond, and the mean residual errors are 0.019 pixels in x direction and 0.016 pixels in y direction. Furthermore, the initial parameters are simpler and there is no need to set initial values. Its accuracy is further verified by actual star maps of ZY-3 satellite, and result shows that it can improve the calibration accuracy largely. To further improve the calibration accuracy, higher precision centroid algorithm is recommended in actual applications. -

-
References
[1] 孙高飞, 张国玉, 郑茹, 等.星敏感器标定方法的研究现状与发展趋势[J].长春理工大学学报(自然科学版), 2010, 33(4): 8–14. Sun Gaofei, Zhang Guoyu, Zheng Ru, et al. Star sensor calibration research and development[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2010, 33(4): 8–14. [2] 李欣璐, 杨进华, 张刘, 等.带有恒星自行校正的星敏感器定姿[J].光电工程, 2015, 42(2): 35–40. Li Xinlu, Yang Jinhua, Zhang Liu, et al. Attitude determination of the star sensor with the star proper motion correction[J]. Opto-Electronic Engineering, 2015, 42(2): 35–40. [3] Shuster M D, Chitre D M, Niebur D P. In-flight estimation of spacecraft attitude sensor accuracies and alignments[J]. Journal of Guidance, Control, and Dynamics, 1982, 5(4): 339–343. doi: 10.2514/3.19772 [4] Ju G. Autonomous star sensing, pattern identification, and attitude determination for spacecraft: an analytical and experimental study[D]. Texas: Texas A & M University, 2001: 99–131. [5] Samaan M A. Toward faster and more accurate star sensors using recursive centroiding and star identification[D]. Texas: Texas A&M University, 2003: 25–29. [6] 邢飞, 董瑛, 武延鹏, 等.星敏感器参数分析与自主校正[J].清华大学学报(自然科学版), 2005, 45(11): 1484–1488. doi: 10.3321/j.issn:1000-0054.2005.11.012 Xing Fei, Dong Ying, Wu Yanpeng, et al. Star tracker parametric analysis for autonomous calibration[J]. Journal of Tsinghua University (Science and Technology), 2005, 25(11): 1484–1488. doi: 10.3321/j.issn:1000-0054.2005.11.012 [7] 郝雪涛, 张广军, 江洁.星敏感器模型参数分析与校准方法研究[J].光电工程, 2005, 32(3): 5–8. Hao Xuetao, Zhang Guangjun, Jiang Jie. Star Sensor model parameter analysis and calibration method[J]. Opto-Electronic Engineering, 2005, 32(3): 5–8. [8] 谢俊峰, 龚健雅, 江万寿.一种改进的恒星相机在轨检校方法[J].测绘科学, 2009, 34(2): 121–123. Xie Junfeng, Gong Jianya, Jiang Wanshou. An improved on-orbit calibration method for stellar camera[J]. Science of Surveying and Mapping, 2009, 34(2): 121–123. [9] 申娟, 张广军, 魏新国.基于卡尔曼滤波的星敏感器在轨校准方法[J].航空学报, 2010, 31(6): 1220–1224. Shen Juan, Zhang Guangjun, Wei Xinguo. On-orbit calibration of star sensor based on kalman filter[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(6): 1220–1224. [10] 原玉磊. 鱼眼相机恒星法检校技术研究[D]. 郑州: 解放军信息工程大学, 2012: 206–214. Yuan Yulei. Research on fish-eye camera stellar calibration technology[D]. Zhengzhou: PLA Information Engineering Uni-versity, 2012: 206–214. [11] Wei Xinguo, Zhang Guangjun, Fan Qiaoyun, et al. Star sensor calibration based on integrated modelling with intrinsic and extrinsic parameters[J]. Measurement, 2014, 55: 117–125. doi: 10.1016/j.measurement.2014.04.026 [12] Wang Shuang, Geng Yunhai, Jin Rongyu. A novel error model of optical systems and an on-orbit calibration method for star sensors[J]. Sensors, 2015, 15(12): 31428–31441. doi: 10.3390/s151229863 [13] Xiong Kun, Wei Xinguo, Zhang Guangjun, et al. High-accuracy star sensor calibration based on intrinsic and extrinsic parameter decoupling[J]. Optical Engineering, 2015, 54(3): 034112. doi: 10.1117/1.OE.54.3.034112 [14] 詹银虎, 郑勇, 张超, 等.鱼眼相机矢量观测检校模型及其应用[J].测绘学报, 2016, 45(3): 332–338. doi: 10.11947/j.AGCS.2016.20150080 Zhan Yinhu, Zheng Yong, Zhang Chao, et al. Fish-eye camera calibration model based on vector observations and its application[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(3): 332–338. doi: 10.11947/j.AGCS.2016.20150080 [15] 曾文宪, 陶本藻.三维坐标转换的非线性模型[J].武汉大学学报•信息科学版, 2003, 28(5): 566–568. Zeng Wenxian, Tao Benzao. Non-linear adjustment model of three-dimensional coordinate transformation[J]. Geomatics and Information Science of Wuhan University, 2003, 28(5): 566–568. [16] 原玉磊, 蒋理兴, 刘灵杰.罗德里格矩阵在坐标系转换中的应用[J].测绘科学, 2010, 35(2): 178–179, 119. Yuan Yulei, Jiang Lixing, Liu Lingjie. Applications of Lodrigues matrix in coordinates transformation[J]. Science of Surveying and Mapping, 2010, 35(2): 178–179, 119. -
Overview

Abstract: It is urgent to develop high precision calibration model for wide field of view star sensor. It is hard to calculate the camera parameters precisely by using the traditional methods because of large optical aberration. Focused on the on-orbit calibration problem of the wide field of view star sensor, a novel calibration model based on vector observations is proposed. Rodriguez matrix is introduced into the model, and 3 Rodrigues parameters instead of Euler angles, are represented as the exterior parameters to simplify the calculation. The distortion parameters are extended to third order in order to describe the distortion more precisely. Then a joint calculation of intrinsic parameters, exterior parameters and distortion parameters are completed by the model. The performance of the model is analyzed by simulation star map, and result shows that the model has a higher accuracy than the traditional model with Euler angles. In case of a standard deviation of 0.05 pixels star point error, the model can still accurately calculate the camera parameters, and the angle error after calibration is 0.483 arcsecond, and the mean residual errors are 0.019 pixels in x direction and 0.016 pixels in y direction, respectively. Furthermore, the initial parameters are simpler and there is no need to set initial value, and no precise prior attitude information is needed in the calibration process, which will be of great convenience for the practical applications. Its accuracy is further verified by actual star maps of ZY-3 satellite, and result shows that the statistical deviation of star angle after the calibration is 2.376 arcsecond, and the mean residual errors are 0.257 pixels in x direction and 0.151 pixels in y direction respectively, which improve the calibration accuracy largely. Further research on precision analysis is conducted as well. The main procedure is as bellow: Firstly, the Gaussian white noise with the standard deviation of 0 to 1 pixel by steps of 0.01 pixels is added to the star point position, and then the mean value of precision indexes of 100 experiments is calculated. The result shows that the star extraction precision of actual star map is about 0.20 pixels to 0.33 pixels, and to further improve the calibration accuracy, higher precision centroid algorithm is recommended in actual applications.
-
Access History

Export File
Citation
Yuan Xiaobo, Zhang Chao. An on-orbit calibration model for wide field of view star sensor based on the vector observations[J]. Opto-Electronic Engineering, 2017, 44(5): 505-510. doi: 10.3969/j.issn.1003-501X.2017.05.005
Format
Content
 DownLoad:
DownLoad:
-
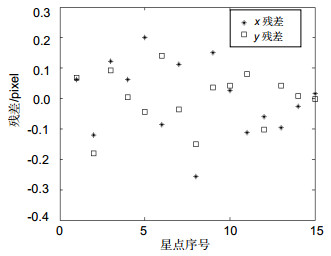
Figure 1.
The residual errors in x and y directions after calibration.
-
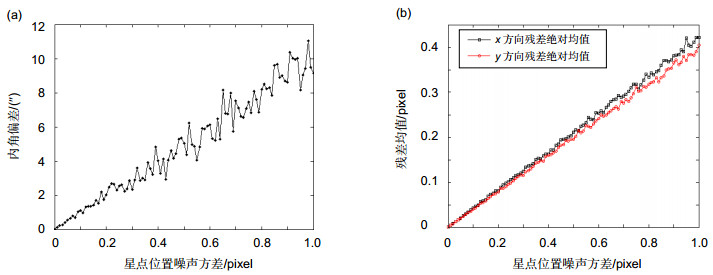
Figure 2.
The star position error's influence on calibration accuracy. (a) The star position error's influence on star angle error. (b) The star position error's influence on the residual errors in x and y directions.


