
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Cheng Q, Gao X J, Gao J, et al. A generative method for atmospheric polarization modelling based on neighborhood constraint[J]. Opto-Electron Eng, 2022, 49(6): 210423. doi: 10.12086/oee.2022.210423

|
A generative method for atmospheric polarization modelling based on neighborhood constraint
-
Abstract
Atmospheric polarization mode supports the polarization navigation application by virtue of the "∞" feature containing the solar meridian information. However, due to the limitation of the physical characteristics of the acquisition device, the surrounding environment of the acquisition location and the occlusion of thin clouds, the obtained atmospheric polarization information is partially distorted and the accuracy of the solar meridian is reduced. In order to solve this problem, this paper proposes an atmospheric polarization pattern generation network based on neighborhood constraints. The network mines the continuity of atmospheric polarization pattern distribution, increases the constraints of reconstruction process through multi-step neighborhood feature reasoning, and accurately generates global atmospheric polarization information from local effective polarization information. In addition, according to the physical characteristics of the atmospheric polarization mode, the angle loss of solar meridian is proposed to further improve the accuracy of the solar meridian. In this paper, experiments are carried out on the measured atmospheric polarization data, and compared with other latest methods. The experimental results show the robustness and superiority of this method. -

-
References
[1] Suhai B, Horváth G. How well does the Rayleigh model describe the E-vector distribution of skylight in clear and cloudy conditions? A full-sky polarimetric study[J]. J Opt Soc Am A, 2004, 21(9): 1669−1676. doi: 10.1364/JOSAA.21.001669 [2] Chu J K, Zhao K C, Zhang Q, et al. Construction and performance test of a novel polarization sensor for navigation[J]. Sens Actuators A Phys, 2008, 148(1): 75−82. doi: 10.1016/j.sna.2008.07.016 [3] Tao Q Q, Guo Z Y, Xu Q, et al. Retrieving the polarization information for satellite-to-ground light communication[J]. J Opt, 2015, 17(8): 085701. doi: 10.1088/2040-8978/17/8/085701 [4] Zhao H J, Xu W J, Zhang Y, et al. Polarization patterns under different sky conditions and a navigation method based on the symmetry of the AOP map of skylight[J]. Opt Express, 2018, 26(22): 28589−28603. doi: 10.1364/OE.26.028589 [5] 褚金奎, 关乐, 李世奇, 等. 大气偏振模式图分布及仿生偏振导航技术[J]. 遥感学报, 2018, 22(6): 969−979. Chu J K, Guan L, Li S Q, et al. Atmospheric polarization field pattern distribution and polarization navigation technology[J]. J Remote Sens, 2018, 22(6): 969−979. [6] 魏伟, 武云云. 惯性/天文/卫星组合导航技术的现状与展望[J]. 现代导航, 2014, 5(1): 62−65. Wei W, Wu Y Y. Status and prospect of INS/CNS/GNSS integrated navigation technology[J]. Mod Navig, 2014, 5(1): 62−65. [7] Quan W, Li J L, Gong X L, et al. INS/CNS/GNSS Integrated Navigation Technology[M]. Heidelberg: Springer, 2015. [8] 周军, 葛致磊, 施桂国, 等. 地磁导航发展与关键技术[J]. 宇航学报, 2008, 29(5): 1467−1472. doi: 10.3873/j.issn.1000-1328.2008.05.001 Zhou J, Ge Z L, Shi G G, et al. Key technique and development for geomagnetic navigation[J]. Journal of Astronautics, 2008, 29(5): 1467−1472. doi: 10.3873/j.issn.1000-1328.2008.05.001 [9] Voss K J. Electra-optic camera system for measurement of the underwater radiance distribution[J]. Opt Eng, 1989, 28(3): 283241. [10] Horváth G, Wehner R. Skylight polarization as perceived by desert ants and measured by video polarimetry[J]. J Comp Phys A, 1999, 184(1): 1−7. doi: 10.1007/s003590050300 [11] 孙洁, 高隽, 怀宇, 等. 全天域大气偏振模式的实时测量系统[J]. 光电工程, 2016, 43(9): 45−50,55. Sun J, Gao J, Huai Y, et al. Real-time measurement system for the pattern of all skylight polarization[J]. Opto-Electron Eng, 2016, 43(9): 45−50,55. [12] 高永, 高隽, 范之国, 等. 多光谱目标偏振信息探测系统设计[J]. 微型机与应用, 2013, 32(10): 92−94. doi: 10.3969/j.issn.1674-7720.2013.10.030 Gao Y, Gao J, Fan Z G, et al. Design of multi-spectral target polarization information detection system[J]. Microcomput Appl, 2013, 32(10): 92−94. doi: 10.3969/j.issn.1674-7720.2013.10.030 [13] 褚金奎, 张慧霞, 王寅龙, 等. 多方向偏振光实时定位样机的设计与搭建[J]. 光学 精密工程, 2017, 25(2): 312−318. doi: 10.3788/OPE.20172502.0312 Chu J K, Zhang H X, Wang Y L, et al. Design and construction of autonomous real-time position prototype based on multi-polarized skylight[J]. Opt Precis Eng, 2017, 25(2): 312−318. doi: 10.3788/OPE.20172502.0312 [14] 陈永台, 张然, 林威, 等. 天空实时全偏振成像探测器设计与搭建[J]. 光学 精密工程, 2018, 26(4): 816−824. doi: 10.3788/OPE.20182604.0816 Chen Y T, Zhang R, Lin W, et al. Design and construction of real-time all-polarization imaging detector for skylight[J]. Opt Precis Eng, 2018, 26(4): 816−824. doi: 10.3788/OPE.20182604.0816 [15] 程光权, 成礼智. 基于小波的方向自适应图像插值[J]. 电子与信息学报, 2009, 31(2): 265−269. Cheng G Q, Cheng L Z. Direction adaptive image interpolation via wavelet transform[J]. J Electron Inf Technol, 2009, 31(2): 265−269. [16] Barnes C, Shechtman E, Finkelstein A, et al. PatchMatch: a randomized correspondence algorithm for structural image editing[J]. ACM Trans Graph, 2009, 28(3): 24. [17] Hays J, Efros A A. Scene completion using millions of photographs[J]. Commun ACM, 2008, 51(10): 87−94. doi: 10.1145/1400181.1400202 [18] 李爱菊, 钮文良. 基于改进Criminisi算法的图像修复[J]. 计算机工程与应用, 2014, 50(18): 167−170. doi: 10.3778/j.issn.1002-8331.1401-0419 Li A J, Niu W L. Image inpainting based on improved Criminisi algorithm[J]. Comput Eng Appl, 2014, 50(18): 167−170. doi: 10.3778/j.issn.1002-8331.1401-0419 [19] Pathak D, Krähenbühl P, Donahue J, et al. Context encoders: feature learning by inpainting[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, 2016: 2536–2544. [20] Radford A, Metz L, Chintala S. Unsupervised representation learning with deep convolutional generative adversarial networks[C]//4th International Conference on Learning Representations, 2016. [21] Iizuka S, Simo-Serra E, Ishikawa H. Globally and locally consistent image completion[J]. ACM Trans Graphics, 2017, 36(4): 107. [22] Yan Z Y, Li X M, Li M, et al. Shift-Net: Image inpainting via deep feature rearrangement[C]//Proceedings of the 15th European Conference on Computer Vision (ECCV), 2018: 3–19. [23] Yu J H, Lin Z, Yang J M, et al. Generative image inpainting with contextual attention[C]//Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018: 5505–5514. [24] Liu G L, Reda F A, Shih K J, et al. Image inpainting for irregular holes using partial convolutions[C]//Proceedings of the 15th European Conference on Computer Vision (ECCV), 2018: 89–105. [25] Yu J H, Lin Z, Yang J M, et al. Free-form image inpainting with gated convolution[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision, 2019: 4470–4479. [26] Xiong W, Yu J H, Lin Z, et al. Foreground-aware image inpainting[C]//Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 5833–5841. [27] Nazeri K, Ng E, Joseph T, et al. EdgeConnect: Structure guided image inpainting using edge prediction[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision Workshops, 2019: 3265–3274. [28] Li J Y, He F X, Zhang L F, et al. Progressive reconstruction of visual structure for image inpainting[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision, 2019: 5961–5970. [29] Ronneberger O, Fischer P, Brox T. U-Net: convolutional networks for biomedical image segmentation[C]//Proceedings of the 18th International Conference on Medical Image Computing and Computer-Assisted Intervention, 2015: 234–241. [30] Li J Y, Wang N, Zhang L F, et al. Recurrent feature reasoning for image inpainting[C]//Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 7757–7765. [31] Dang T Y, Liu Y T, Gao X J, et al. Multi-scale spatial transform network for atmospheric polarization prediction[C]//Proceedings of the 11th International Conference on Image and Graphics, 2021: 479–490. [32] 甘鑫, 高欣健, 钟彬彬, 等. 基于有限样本的大气偏振模式生成方法[J]. 光电工程, 2021, 48(5): 200331. Gan X, Gao X J, Zhong B B, et al. A few-shot learning based generative method for atmospheric polarization modelling[J]. Opto-Electron Eng, 2021, 48(5): 200331. -
Overview
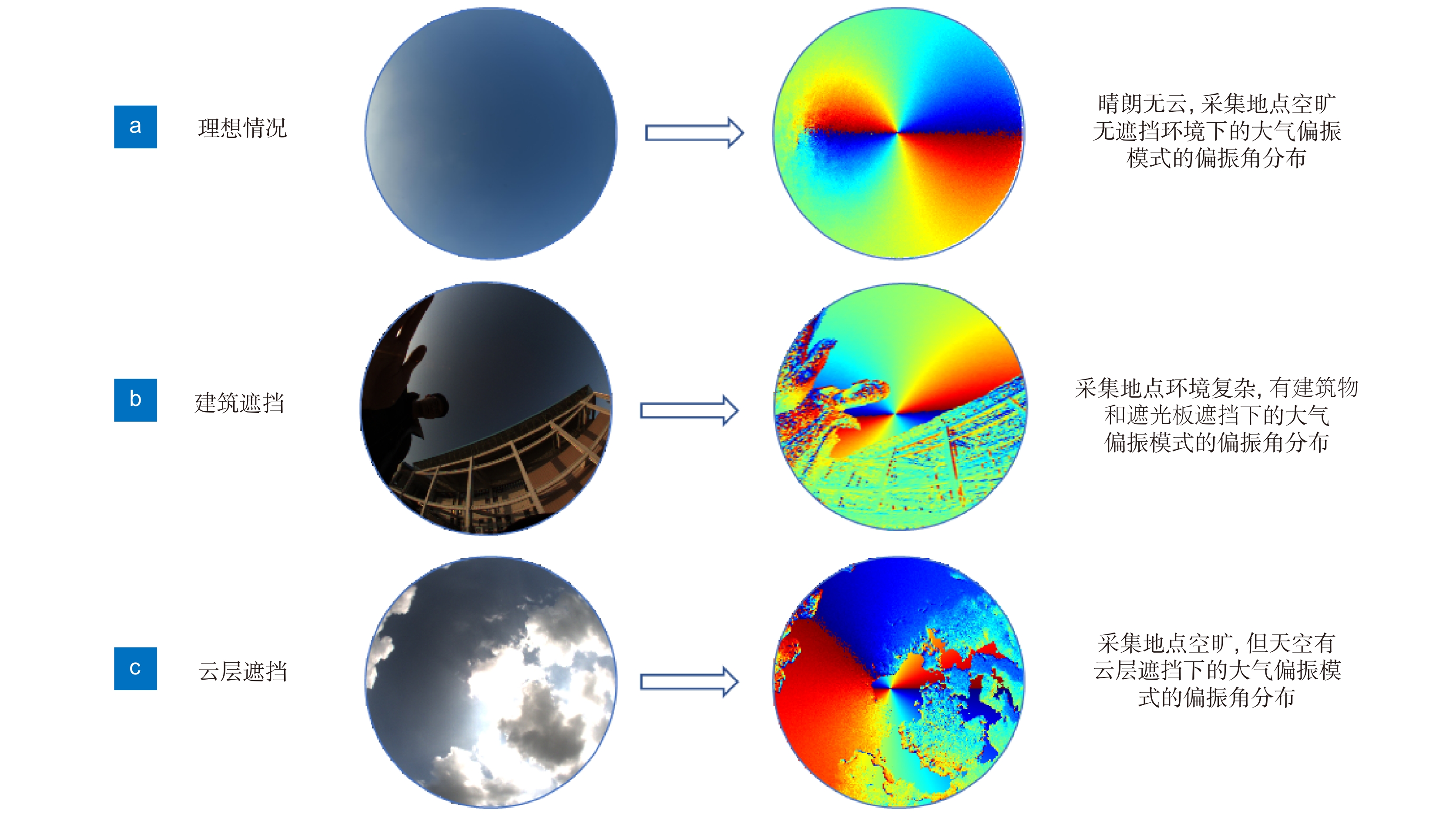
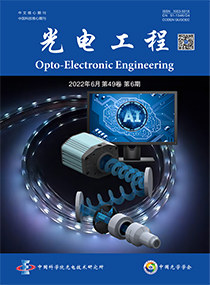
Atmospheric polarization mode has important application value in the field of the autonomous navigation because of its stable meridian characteristics. However, its acquisition is limited by the physical characteristics of the acquisition device and is easy to be blocked by the surrounding environment of the acquisition location and thin clouds, resulting in the reduction or disappearance of the local atmospheric polarized light between the acquisition device and the shelter (buildings, trees, thin clouds, etc.). When capturing the atmospheric polarization information, it often produces the degradation of the atmospheric polarization characteristics in irregular areas and destroys the overall structure of the atmospheric polarization mode. As a result, the accuracy of its meridian decreases. To solve this problem, this paper proposes a neighborhood constrained atmospheric polarization mode generation network, which combines the neighborhood constraint characteristics of the atmospheric polarization information. It carries out multi-step neighborhood feature reasoning through the neighborhood feature repair module, and gradually propagates the continuous distribution characteristics of the atmospheric polarization information to the missing region, so as to increase the feature constraints in the reconstruction process. In addition, this paper further puts forward the constraint condition on the physical characteristics of the atmospheric polarization mode - Solar meridian angle loss. The solar meridian feature that generates atmospheric polarization information is extracted by the solar meridian feature constraint, and compared with the solar meridian feature of the real atmospheric polarization mode, so as to guide the generation process and improve the meridian accuracy of reconstruction results. Finally, because the acquisition of atmospheric polarization modes is limited by time, space and the number of the acquisition equipment, it is difficult to directly obtain the local atmospheric polarization modes under different conditions at the same time. Therefore, this paper proposes a binary mask data set containing four distribution types, which combined with the measured global atmospheric polarization data. It can also simulates the local effective atmospheric polarization information under different conditions and improves the diversity of local atmospheric polarization mode data. In this paper, experiments are carried out on the measured atmospheric polarization data and compared with other latest methods. The experimental results show the robustness and superiority of this method.
-
Access History

Export File
Citation
Cheng Q, Gao X J, Gao J, et al. A generative method for atmospheric polarization modelling based on neighborhood constraint[J]. Opto-Electron Eng, 2022, 49(6): 210423. doi: 10.12086/oee.2022.210423
Format
Content
 DownLoad:
DownLoad:
-
Figure 1.
Polarization angle distribution of the atmospheric polarization under different occlusions
-
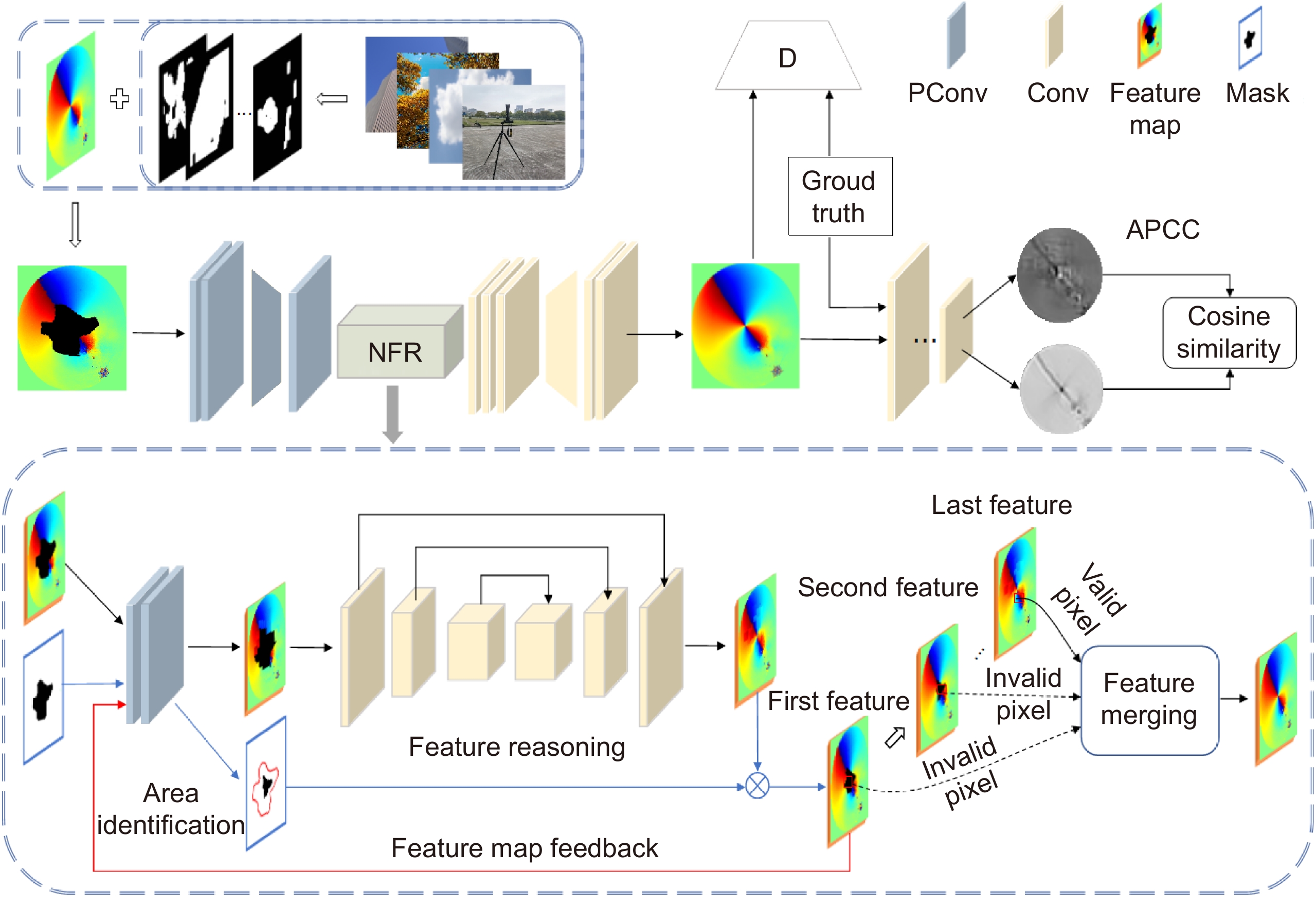
Figure 2.
Network structure of the atmospheric polarization mode generation based on neighborhood constraints
-
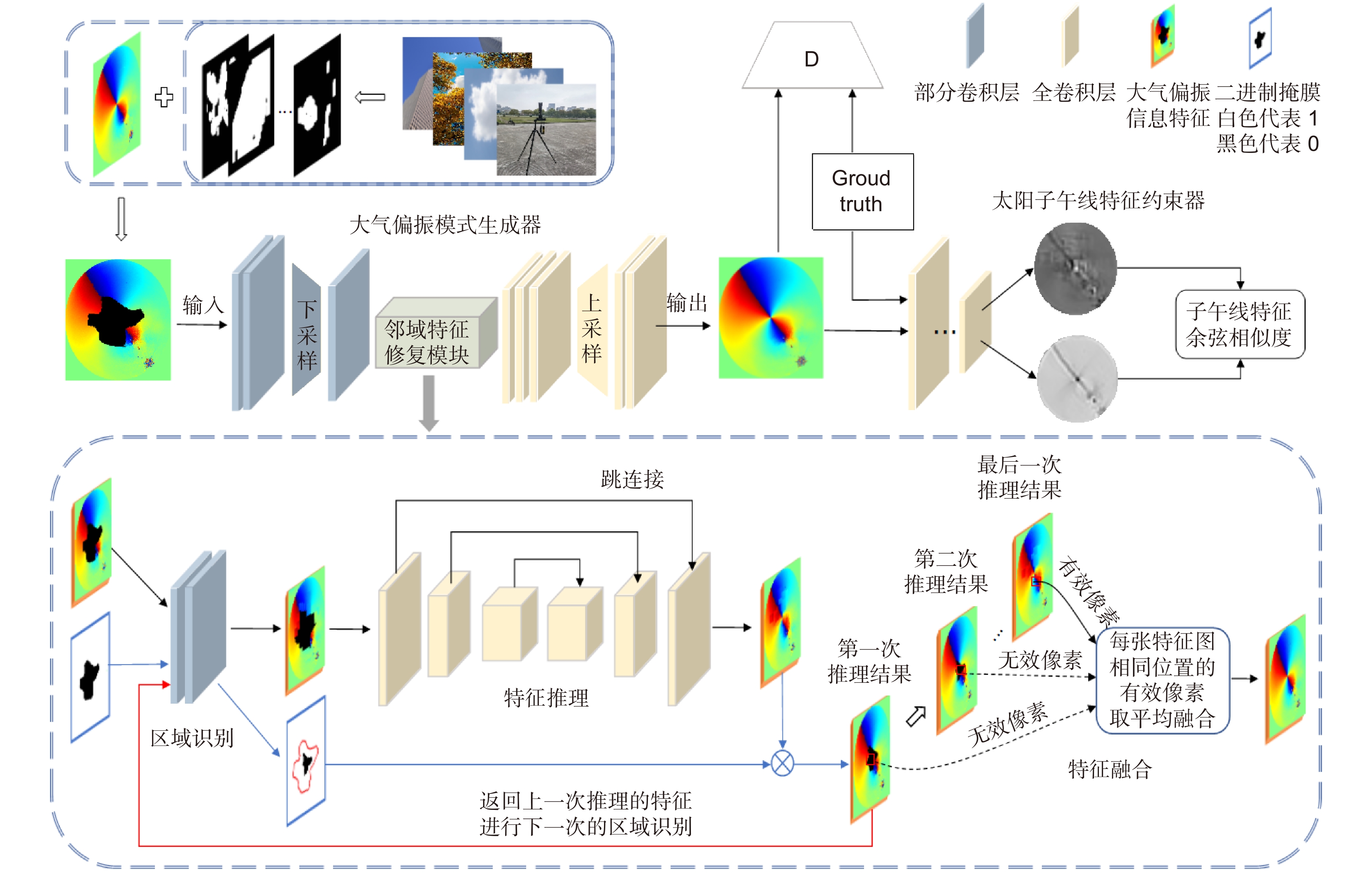
Figure 3.
Schematic diagram of the binary mask update for the area recognition
-
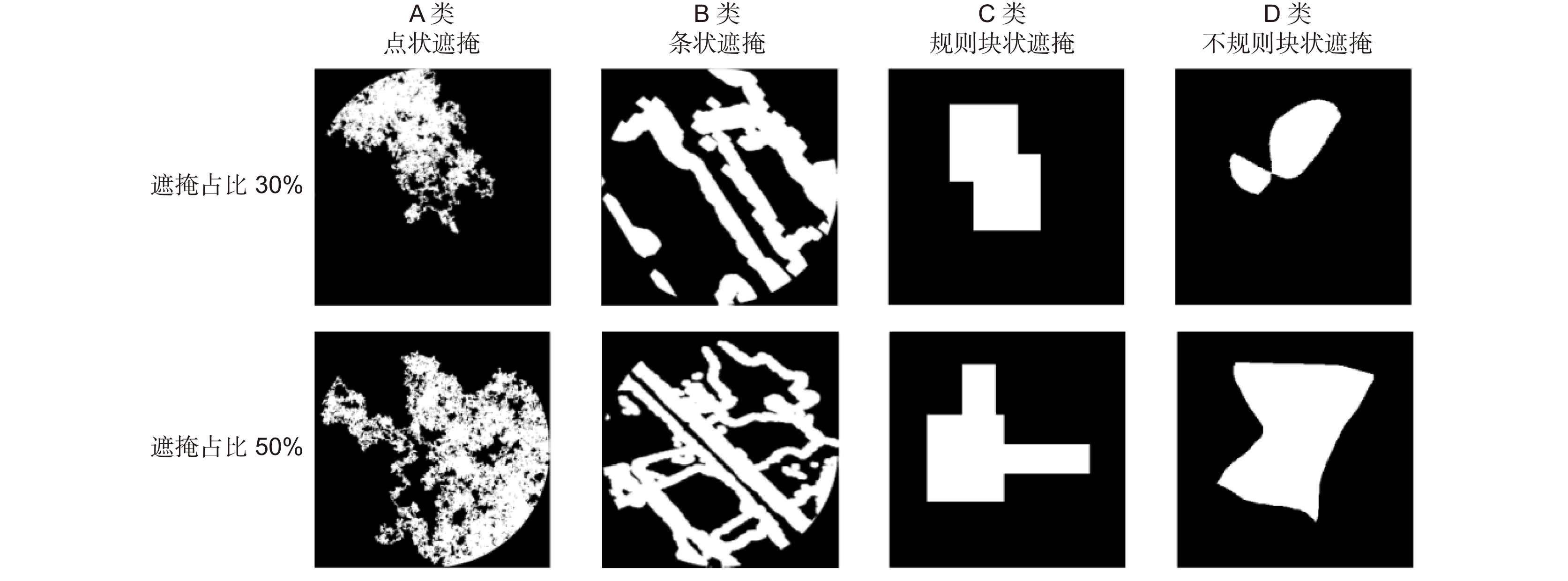
Figure 4.
Atmospheric polarization mode masks
-
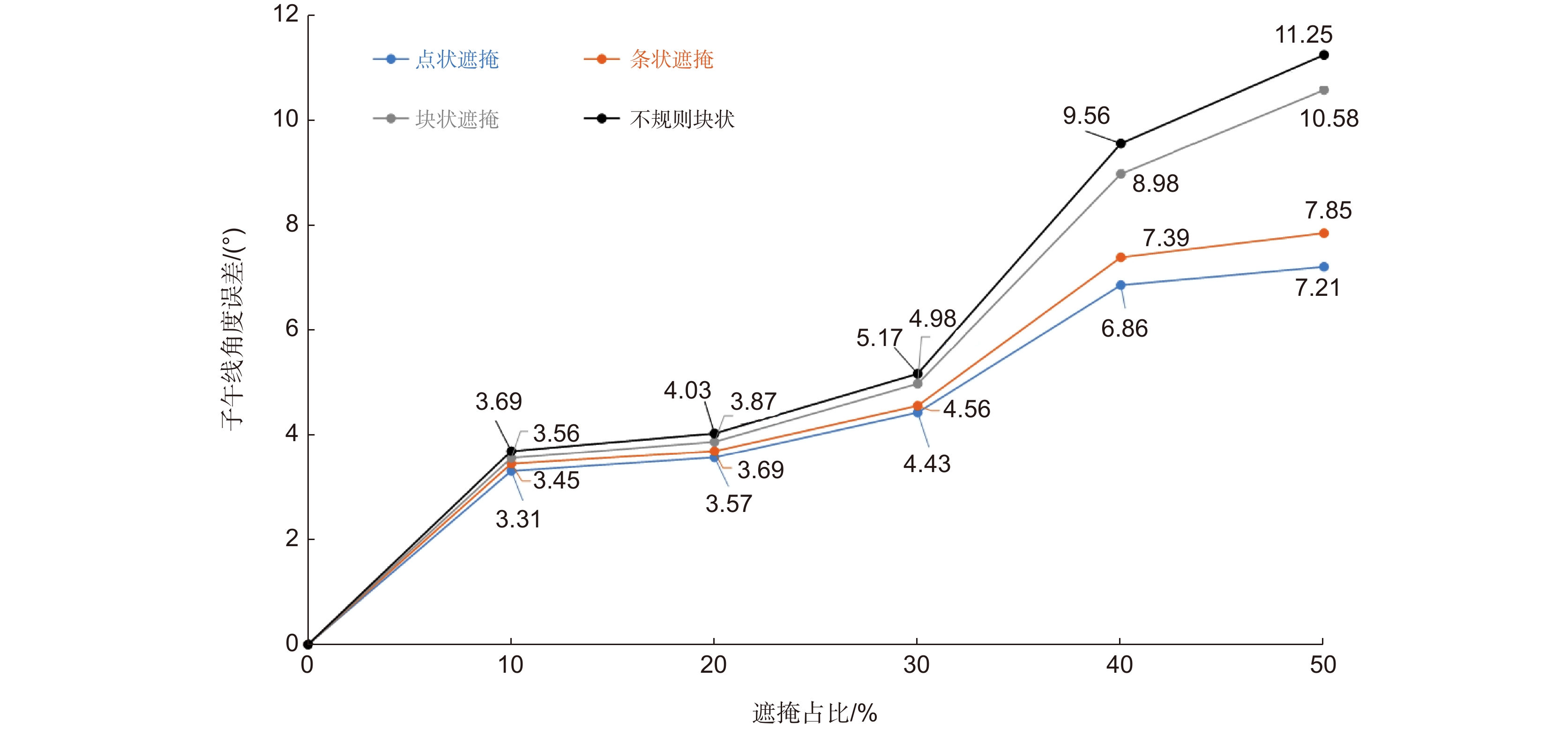
Figure 5.
Angular error results of the solar meridian under different masking types
-
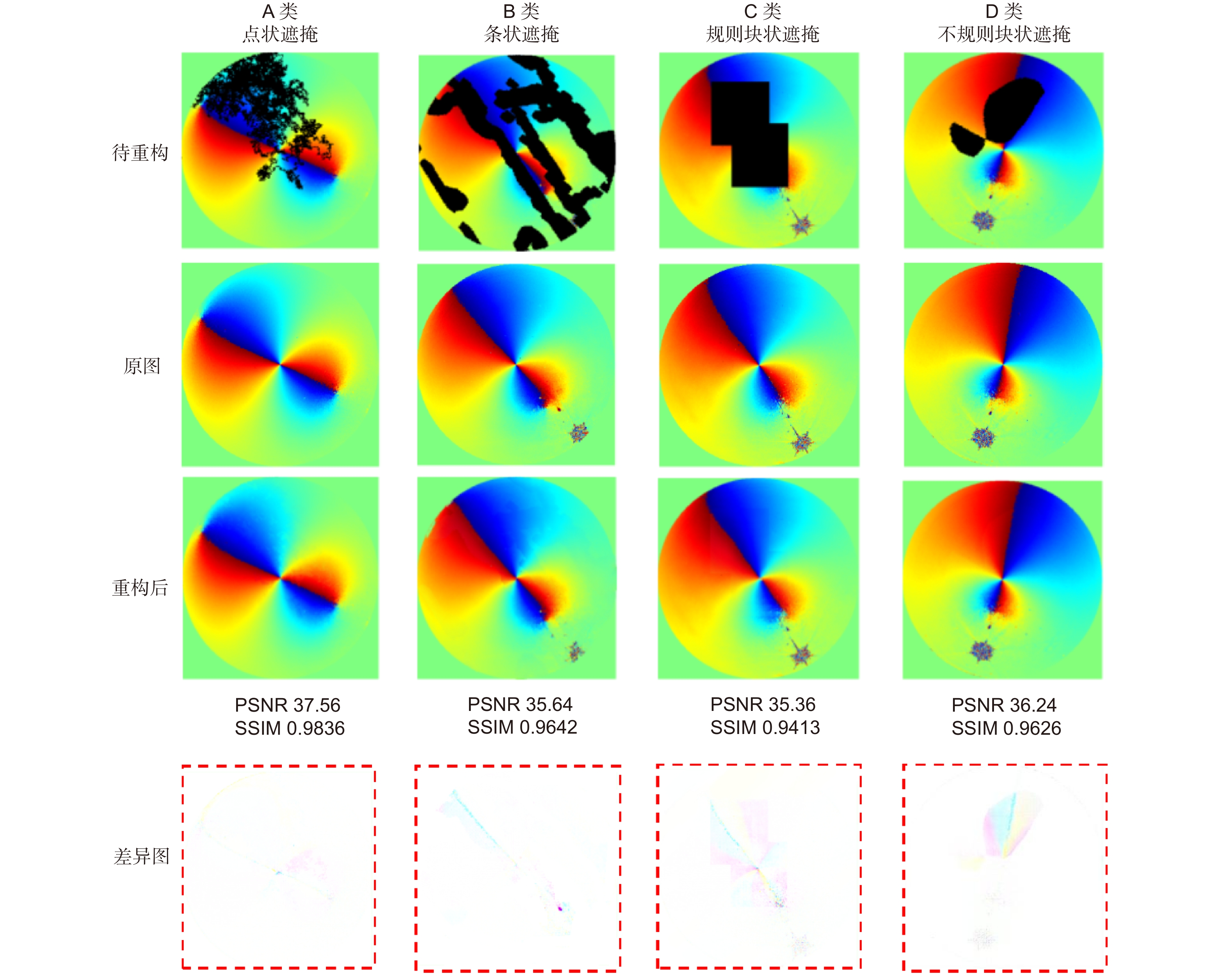
Figure 6.
Reconstruction result of measured atmospheric polarization mode
-
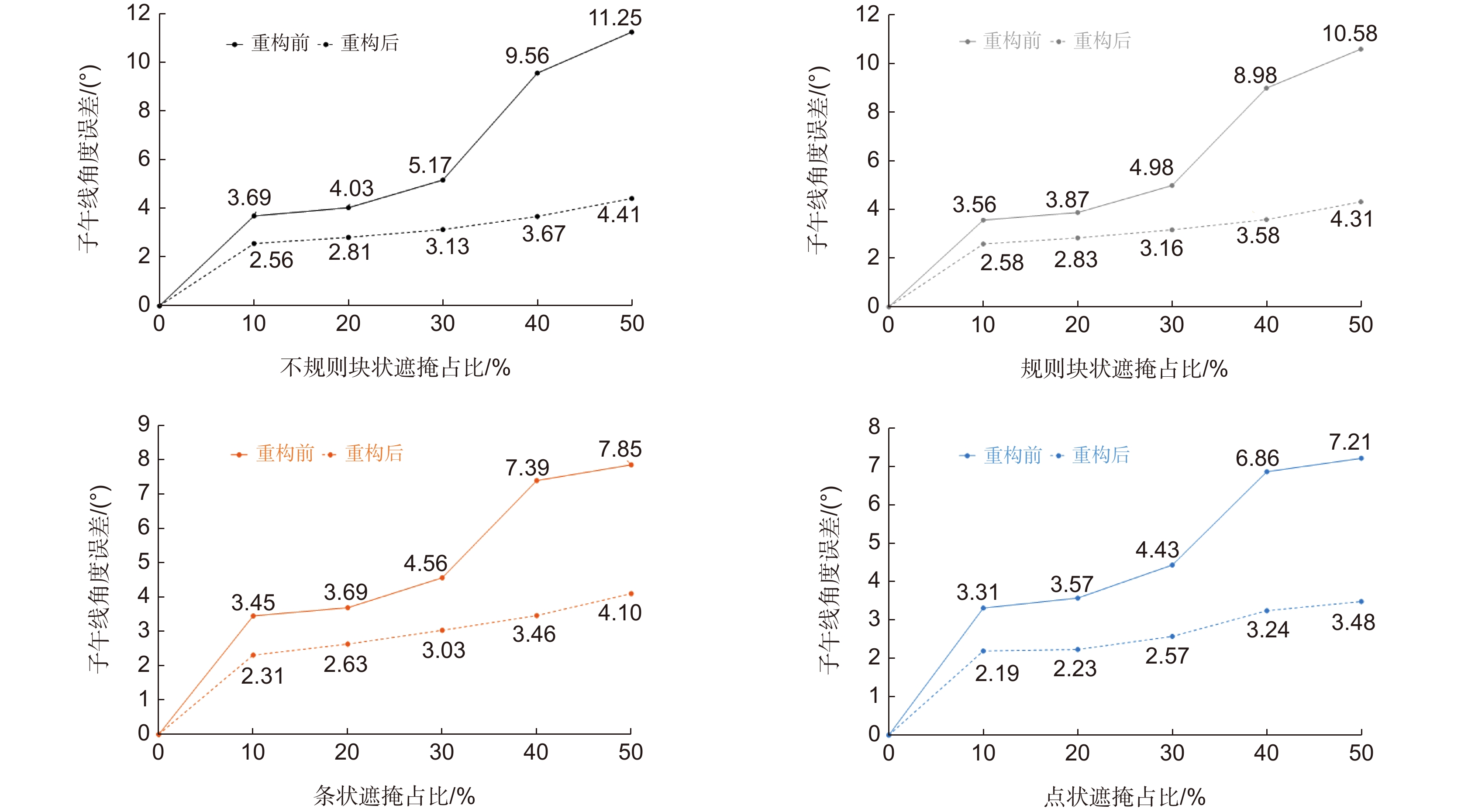
Figure 7.
Comparison of the solar meridian angle error before and after reconstruction
-
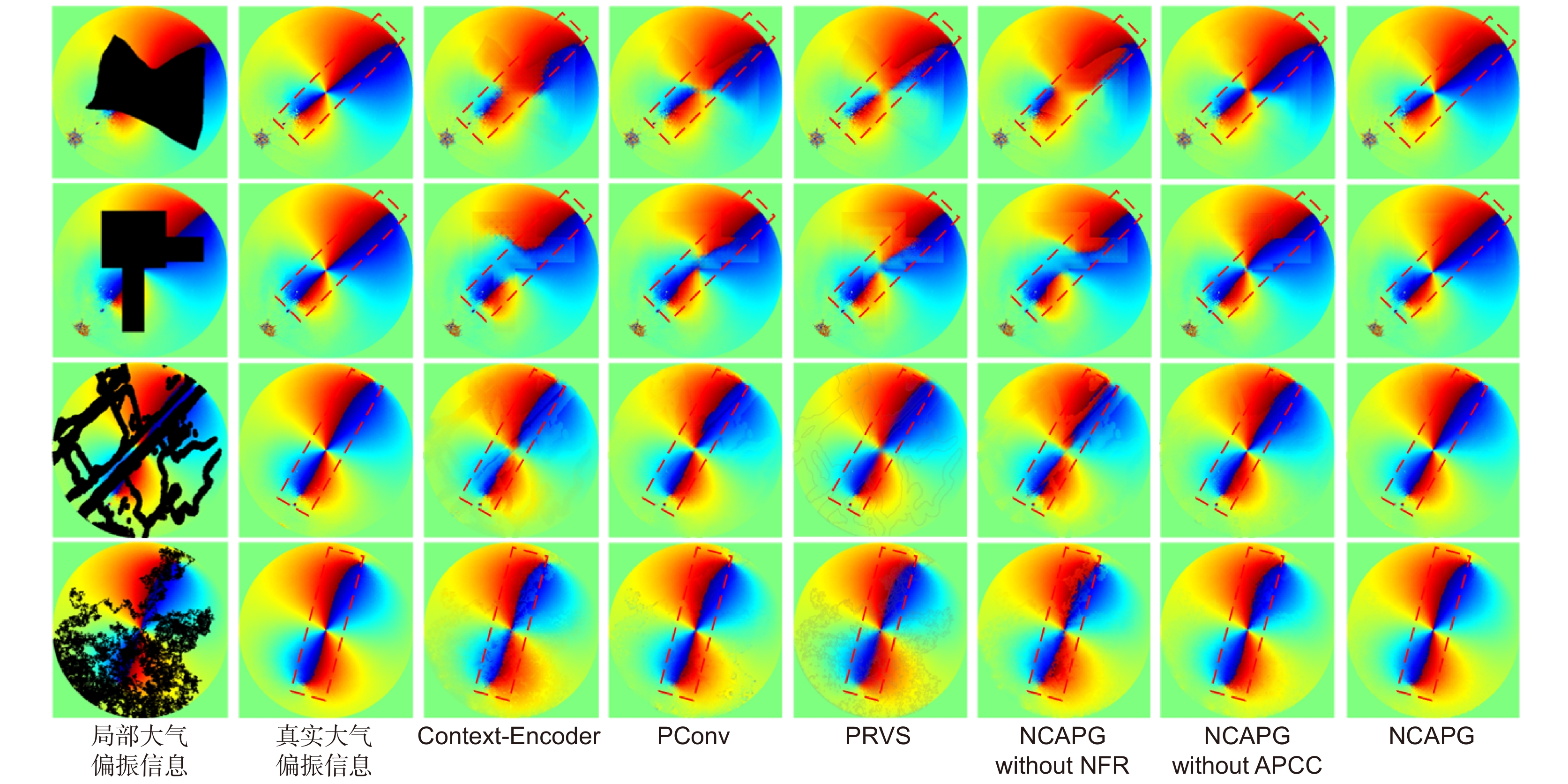
Figure 8.
Comparison of the results of different reconstruction methods
-
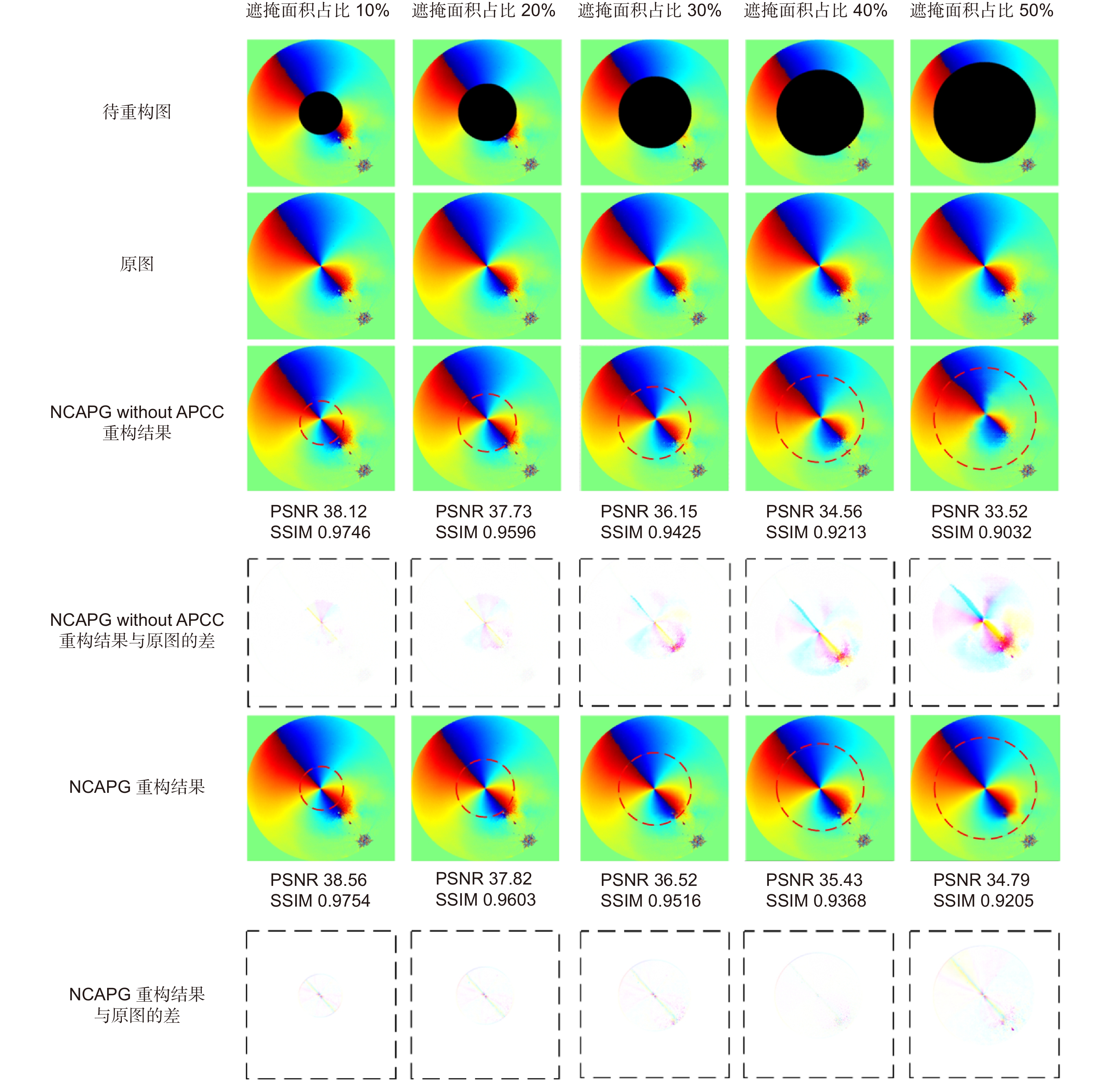
Figure 9.
Constrained ablation results of the solar meridian
-
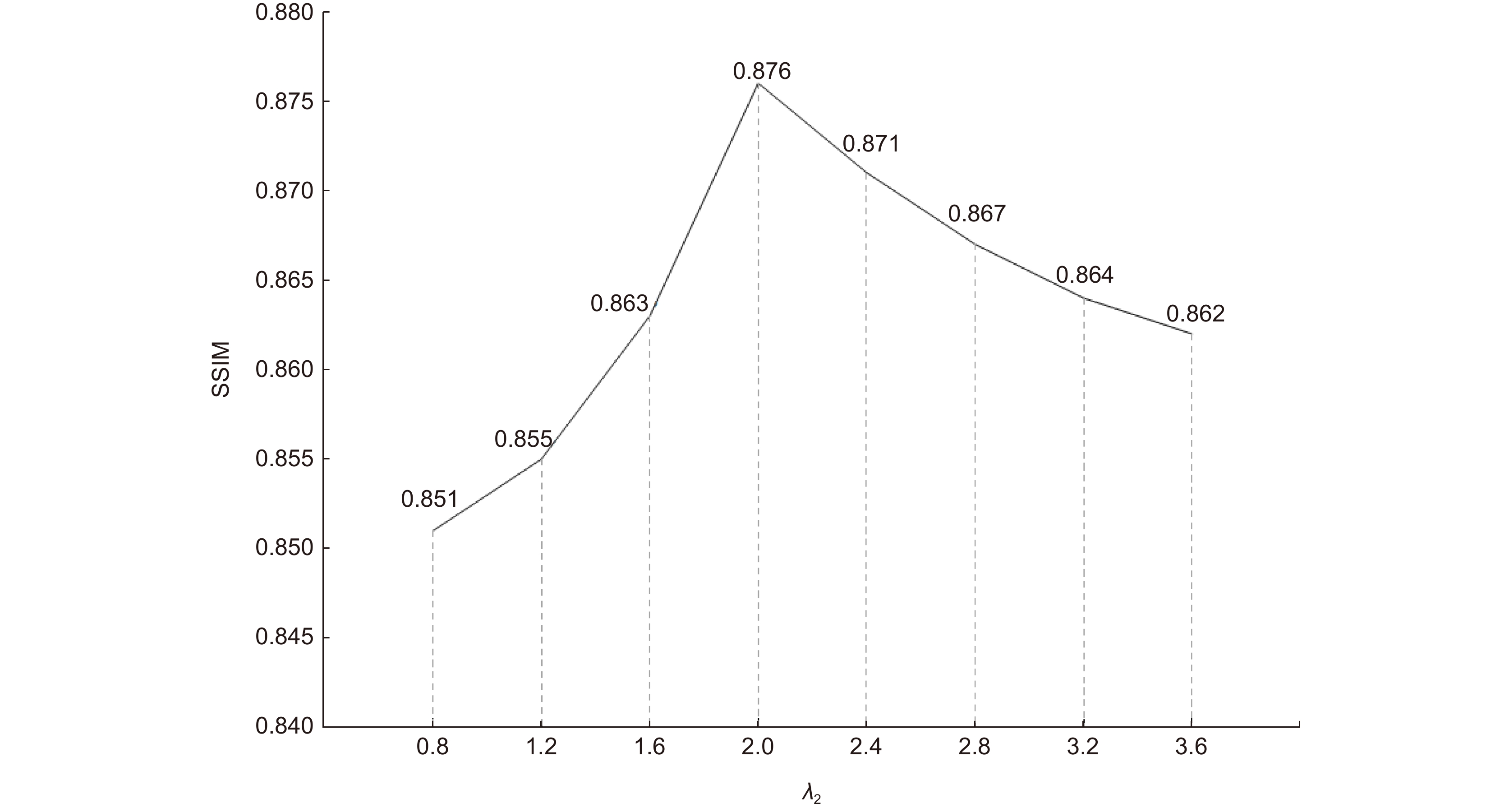
Figure 10.
Influence of different values of λ2 on the performance of this method
- Figure .


