
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |

|
Research on optothermal microactuation method and technology in liquid
-
Abstract
In this paper, the optothermal microactuation technology and optothermal microactuator (OTMA) suitable for water or other liquids are proposed and developed. The model of optothermal expansion and temperature rise distribution is established, and simulation on a 1080 μm long OTMA is conducted, revealing the feasibility of optothermal microactuation technology in water. The optothermal microactuation experiment of a symmetrical OTMA is carried out in water under the irradiation of a laser with a wavelength of 520 nm and adjustable power, revealing that the optothermal deflection increases with the increase of the laser power. Another experiment is carried out under the irradiation of a laser pulse with a wavelength of 520 nm, effective power of 4 mW, and an adjustable frequency, demonstrating that the symmetric OTMA has a good dynamic response under the laser irradiation. The amplitude of the actuating (deflection) amount varies between 2.6 μm and 3.7 μm when irradiated by the laser pulse with a frequency of 0.9 Hz~16.4 Hz, and it decreases with the increase of the frequency of the laser pulse. The theoretical research and experimental curve trend reveals that it is completely feasible to obtain greater deflection and higher frequency optothermal microactuation in water by appropriately increasing the laser power and laser pulse frequency. This research provides new methods and approaches for the application of micro-opto-electromechanical systems and micro-nano technology. -

-
References
[1] Conrad H, Schenk H, Kaiser B, et al. A small-gap electrostatic micro-actuator for large deflections[J]. Nat Commun, 2015, 6(1): 10078. doi: 10.1038/ncomms10078 [2] Li H J, Barnes P, Harding E, et al. Large-displacement vertical electrostatic microactuator dynamics using duty-cycled softening/stiffening parametric resonance[J]. J Microelectromech Syst, 2019, 28(3): 351–361. doi: 10.1109/JMEMS.2019.2911183 [3] Liu J K, Liu Y X, Zhao L L, et al. Design and experiments of a single-foot linear piezoelectric actuator operated in a stepping mode[J]. IEEE Trans Industr Electron, 2018, 65(10): 8063–8071. doi: 10.1109/TIE.2018.2798627 [4] Shokrgozar A, Safarpour H, Habibi M. Influence of system parameters on buckling and frequency analysis of a spinning cantilever cylindrical 3D shell coupled with piezoelectric actuator[J]. Proc Instit Mech Eng Part C: J Mech Eng Sci, 2020, 234(2): 512–529. doi: 10.1177/0954406219883312 [5] Duvernoy B, Farkhatdinov I, Topp S, et al. Electromagnetic actuator for tactile communication[M]//Prattichizzo D, Shinoda H, Tan H Z, et al. Haptics: Science, Technology, and Applications. Cham: Springer, 2018. [6] Salerno M, Firouzeh A, Paik J, et al. A low profile electromagnetic actuator design and model for an origami parallel platform[J]. J Mech Robot, 2017, 9(4): 041005. doi: 10.1115/1.4036425 [7] Yu Y W, Zhang C, Zhou M L. NARMAX model-based hysteresis modeling of magnetic shape memory alloy actuators[J]. IEEE Trans Nanotechnol, 2019, 19: 1–4. [8] Zhang C, Yu Y W, Wang Y F, et al. Takagi–sugeno fuzzy neural network hysteresis modeling for magnetic shape memory alloy actuator based on modified bacteria foraging algorithm[J]. Int J Fuzzy Syst, 2020, 22(4): 1314–1329. doi: 10.1007/s40815-020-00826-9 [9] Evstafyev S, Samoylikov V. Research and analysis of heat exchange processes of a micromechanical mirror based on a thermal microactuator[J]. Proc SPIE, 2019, 11022: 110220U. [10] Lin X T, Han Q, Huang J Z. Effect of defects on the motion of carbon nanotube thermal actuator[J]. Nanotechnol Rev, 2019, 8(1): 79–89. doi: 10.1515/ntrev-2019-0007 [11] Kim T H, Choi J G, Byun J Y, et al. Biomimetic thermal-sensitive multi-transform actuator[J]. Sci. Rep. , 2019, 9(1): 7905. doi: 10.1038/s41598-019-44394-x [12] Kim S, Zhang X, Daugherty R, et al. Ultrasonic electrostatic actuators on a flexible substrate[J]. Proceedings of the IEEE 25th International Conference on Micro Electro Mechanical Systems, Paris, France, 2015: 1193–1196. [13] Geetha G K, Mahapatra D R. Modeling and simulation of vibro-thermography including nonlinear contact dynamics of ultrasonic actuator[J]. Ultrasonics, 2019, 93: 81–92. doi: 10.1016/j.ultras.2018.11.001 [14] Cao Y, Dong J Y. High-performance low-voltage soft electrothermal actuator with directly printed micro-heater[J]. Sens Actuat A: Phys, 2019, 297: 111546. doi: 10.1016/j.sna.2019.111546 [15] Cao Y, Dong J Y. Fabrication and self-sensing control of soft electrothermal actuator[J]. Proced Manuf, 2020, 48: 43–48. doi: 10.1016/j.promfg.2020.05.018 [16] Liu C, Zhang D X, Zhang H J. Experimental study of the characteristics of novel microactuator based on optothermal expansion[J]. High Technol Lett, 2009, 15(2): 131–134. [17] Mark J E. Polymer data handbook, 2nd ed[J]. J Am Chem Soc, 2009, 131(44): 16330–16330. [18] Pope R M, Fry E S. Absorption spectrum (380–700 nm) of pure water. II. Integrating cavity measurements[J]. Appl Opt, 1997, 36(33): 8710–8723. doi: 10.1364/AO.36.008710 -
Overview

Overview: With the rapid development of micro-nano technology and micro-electromechanical systems (MEMS) and micro-opto-electromechanical systems (MOEMS), microactuation technology and microactuators or microactuation mechanisms have become research hotspots. Traditional thermal microactuators are mainly based on electrothermal excitation, which obtains thermal deformation by generating ohmic heat of electric current flowing through the asymmetric expansion arms. Such microactuators are capable of gaining larger displacement and generating bigger actuating forces. Contrary to the advantages, the electrothermal microactuators (ETMAs) always require a built-in power source or connecting circuit, resulting in difficulty of miniaturization of the whole device and operating in liquid. In spite of ETMAs, both symmetric and asymmetric OTMAs are available for obtaining microactuation and being applied in water or other liquids without electric circuits and loops. This paper proposes and develops the optothermal microactuation technology and optothermal microactuator (OTMA) suitable for water or other liquids. An optothermal expansion model of the OTMA's expansion arm in water under laser irradiation is established. The temperature rise distribution formula of the expansion arm is derived by the finite element analysis, and simulation on the expansion arm with a length of 1080 μm and a width of 90 μm under 4 mW laser irradiation is conducted, revealing the feasibility of optothermal microactuation technology in water. The optothermal microactuation experiment of a symmetrical OTMA is carried out in water for the first time under the irradiation of a laser pulse with a wavelength of 520 nm and adjustable power. The results reveal that the amount of optothermal deflection of the expansion arm increases with the increase of the laser power. Another experiment is carried out under the irradiation of a laser pulse with a wavelength of 520 nm, effective power of 4 mW, and an adjustable frequency. The results demonstrate that the symmetric OTMA has a good dynamic response under the laser irradiation. The amplitude of the actuating (deflection) amount varies between 2.6 μm and 3.7 μm when irradiated by the laser pulse with a frequency of 0.9 Hz~16.4 Hz, and it decreases with the increase of the frequency of the laser pulse. The theoretical research and experimental curve trend reveals that it is completely feasible to obtain greater deflection and higher frequency optothermal microactuation in water by appropriately increasing the laser power and laser pulse frequency. This research provides new methods and approaches for the application of micro-opto-electromechanical systems and micro-nano technology.
-
Access History
Figures(7)
Tables(1)
Article Metrics

Export File
Citation
Format
Content
 DownLoad:
DownLoad:


-
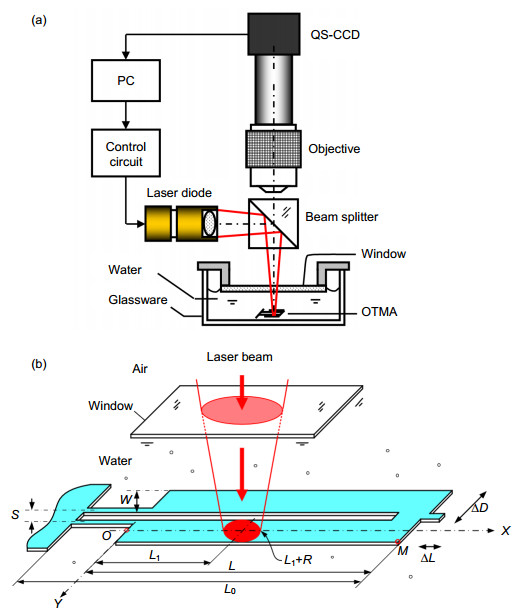
Figure 1.
Schemes of (a) the experimental device for optothermal microactuation operated in water and (b) the symmetric optothermal microactuator operated in water
-
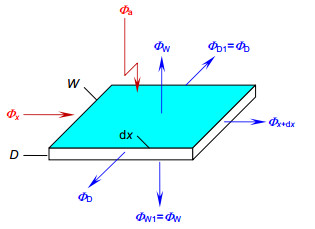
Figure 2.
Schematic diagram of any element of the expansion arm and its heat flow distribution in water
-
Figure 3.
The temperature rise distribution of the symmetrical OTMA expansion arm obtained by simulation
-
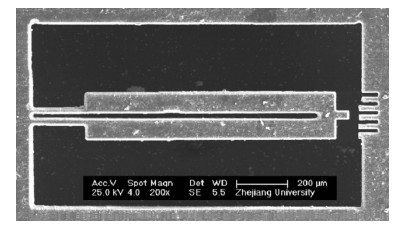
Figure 4.
SEM image of the symmetrical OTMA
-
Figure 5.
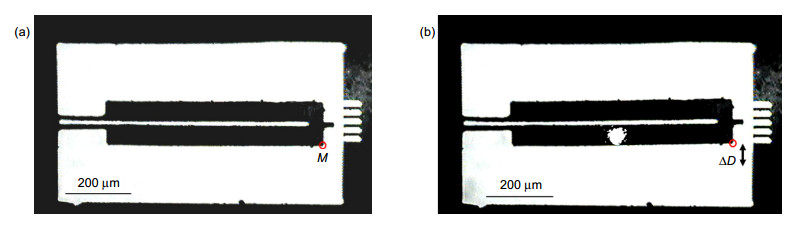
Microscopic images of the symmetric OTMA's (a) original and (b) laser-irradiated states in water
-
Figure 6.
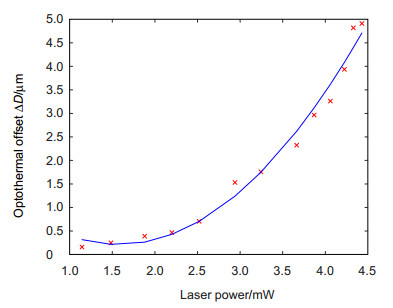
The curve of the average amplitude of OTMA photothermal deflection in water with the change of laser power
-
Figure 7.
Optothermal microactuation experiment results of the symmetrical OTMA under different laser pulse frequencies in water.


