
 E-mail Alert
E-mail Alert RSS
RSS
Learning adaptive spatial regularization and aberrance repression correlation filters for visual tracking
-
摘要:
针对背景感知相关滤波器的空间正则化权重固定,不适应目标变化和增大搜索区域,易引入背景噪声导致滤波器判别力下降等问题,本文提出一种基于自适应空间正则化和畸变抑制的相关滤波跟踪算法。首先提取FHOG特征、CN特征和灰度特征以增强算法模型对目标的表达能力;其次,在目标函数中加入畸变抑制项来约束当前帧的响应图,增强滤波器的判别能力,以缓解滤波器模型退化问题;最后,在目标函数中加入自适应空间正则化项使空间正则化权重能够随着目标的变化而更新,使得滤波器能充分利用目标的多样性信息。本文在公开数据集OTB-2013、OTB-2015和VOT2016上进行实验,以对所提算法进行评估。实验结果表明:本文算法速度为20 f/s,距离精度和成功率等评估指标均优于对比算法,在遮挡、背景干扰、旋转变化等多种复杂场景下都有良好的鲁棒性。
 Abstract:
Abstract:This paper proposes a correlation filter tracking algorithm based on adaptive spatial regularization and aberrance repression aiming at the problem that the spatial regularization weight of the background-aware correlation filter is fixed and does not adapt to the change of the target, and the problem that enlarging search area may introduce background noise, decreasing the discrimination ability of filters. First, FHOG features, CN features, and gray features are extracted to enhance the algorithm's ability to express the target. Second, aberrance repression terms are added to the target function to constrain the response map of the current frame, and to enhance the filter's discrimination ability to alleviate the filter model degradation. Finally, adaptive spatial regularization terms are added to the objective function to make the spatial regularization weights being updated as the objective changes, so that the filter can make full use of the target's diversity information. This paper involves experiments on the public data sets OTB-2013, OTB-2015 and VOT2016 to evaluate the proposed algorithm. The experimental results show that the speed of the algorithm used in this paper is 20 frames/s, evaluation indicators such as distance accuracy and success rate are superior to comparison algorithms, and it has good robustness in a variety of complex scenarios such as occlusion, background interference, and rotation changes.
-

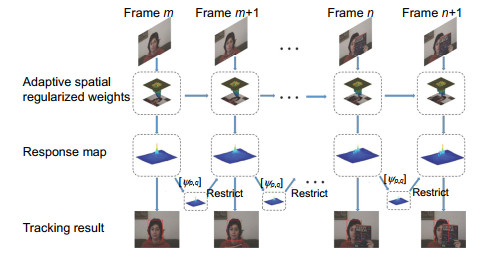
Overview: As the application basis of intelligent video surveillance, motion analysis, human-computer interaction, spanning monitoring, behavior analysis, and UAV tracking, object tracking is one of the most important researches and one of the basic problems in the field of computer vision. Although the object tracking technology has made great progress in the past few decades, it is still a challenging task to track the target accurately and robustly in the case of deformation, occlusion, scale change, background clutter, and so on. Owing to its excellent performance, the kernel correlation filter tracking algorithm has recently become a popular research subject in the object tracking community. However, traditional correlation filter tracking methods use the properties of the cyclic matrix to transform calculations from the spatial domain to the frequency domain. Although calculation speed is improved using this method, some nonreal samples are also generated. This leads to undesired boundary effects, which reduce the discrimination ability of the filter and affect tracking performance. To some extent, these effects were alleviated by adding pre-defined spatial constraints on the filter coefficients or expanding the search area. However, such constraints are usually fixed for different objects and do not change during the tracking process, while expanding the search area can easily introduce background noise. To overcome the shortcomings of the algorithm, a tracking method based on adaptive spatial regularization and aberrance repression is proposed. First, FHOG features, CN features, and gray features are extracted to enhance the algorithm's ability to express targets. Second, the aberrance repression term is introduced into the objective function to constrain the rate of change of the current frame's response map, which can suppress the drift of the tracking box. Finally, the adaptive spatial regularization term is introduced into the objective function, which learns an effective spatial weight for a specific object and its appearance variations. The ADMM algorithm is used to solve the filter model and reduce computation time. In this study, experiments are performed on the OTB-2013, OTB-2015, and VOT2016 public databases. These databases are commonly used to evaluate the performance of tracking algorithms. It is worth mentioning that the OTB public database includes scale variation, illumination variation, occlusion, and background clutter challenges. Thus, it can accurately and objectively evaluate algorithm performance. The authors used KCF, BACF, Staple, ECO-HC, LDES, SRDCF, LMCF, DSST, etc., as comparison algorithms and used MATLAB R2017a as a programming language. Experimental results indicate that the proposed method exhibits excellent performance in tracking accuracy and robustness in complex scenes such as occlusion, background clutter, and rotation changes.
-

-
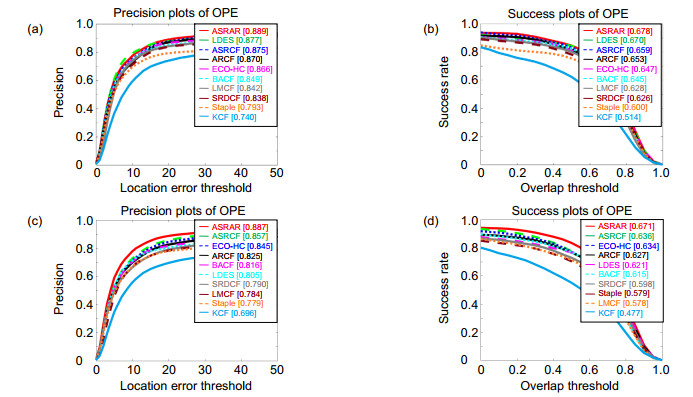
图 2 算法在不同数据集上的实验结果。(a) OTB-2013距离精度曲线;(b) OTB-2013成功率曲线;(c) OTB-2015距离精度曲线;(d) OTB-2015成功率曲线
Figure 2. Experimental results of the algorithm on different data sets.(a) Distance precision of OTB-2013; (b) Success rate of OTB-2013; (c) Distance precision of OTB-2015; (d) Success rate of OTB-2015
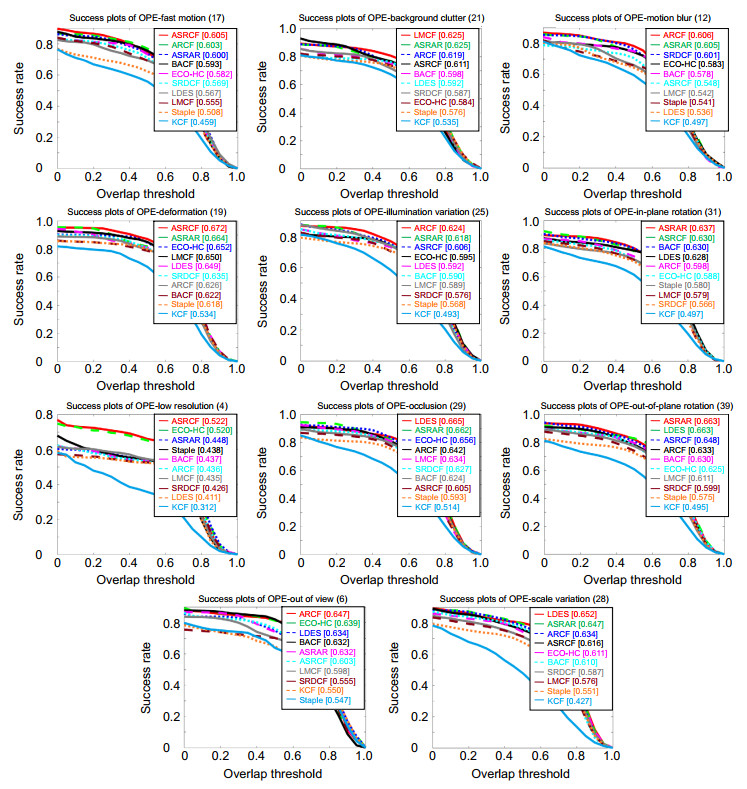
图 3 OTB-2013数据集下11种不同属性视频序列跟踪成功率
Figure 3. Tracking success rates of 11 different attribute video sequences on the OTB-2013 data set

图 4 OTB-2015数据集下11种不同属性视频序列跟踪成功率
Figure 4. Tracking success rates of 11 different attribute video sequences on the OTB-2015 data set
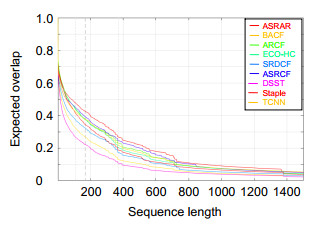
图 6 算法在不同序列长度上的重叠率
Figure 6. Overlap rate of the proposed algorithm on different sequence length
表 1 算法平均跟踪速度
Table 1. Mean tracking speed of different algorithms
Method Speed/(f/s) KCF 173.4 DSST 17.7 Staple 48.3 SRDCF 3.8 BACF 26 ARCF 22 ASRCF 24 ASRAR 20  下载: 导出CSV
下载: 导出CSV
表 2 VOT2016标准下的评估结果
Table 2. Evaluation results under the VOT2016
Method EAO Acc Rob Staple 0.295 0.54 0.378 DSST 0.181 0.50 1.058 SRDCF 0.247 0.52 0.418 BACF 0.223 0.54 0.376 ECO-HC 0.322 0.54 0.263 TCNN 0.325 0.55 0.268 ASRCF 0.342 0.55 0.232 ARCF 0.330 0.53 0.241 ASRAR 0.371 0.56 0.203
下载: 导出CSV
表 3 所选视频序列特征
Table 3. Characteristics of selected video sequences
Sequence Image size/(pixels×pixels) Frame number Characteristic Shaking 624×352 365 IV, SV, IPR, OPR, BC Girl 2 640×480 1500 SV, OCC, DEF, MB, OPR Soccer 640×360 392 IV, SV, OCC, MB, FM, IPR, OPR, BC Bird 1 720×400 408 DEF, FM, OV Biker 640×360 142 SV, OCC, MB, FM, OPR, OV, LR Sylvester 320×240 1345 IV, IPR, OPR
下载: 导出CSV
-
[1] Yilmaz A, Javed O, Shah M. Object tracking: a survey[J]. ACM Comput Surv, 2006, 38(4): 1–45.
[2] Smeulders A W M, Chu D M, Cucchiara R, et al. Visual tracking: an experimental survey[J]. IEEE Trans Pattern Anal Mach Intell, 2014, 36(7): 1442–1468. doi: 10.1109/TPAMI.2013.230
[3] 卢湖川, 李佩霞, 王栋. 目标跟踪算法综述[J]. 模式识别与人工智能, 2018, 31(1): 61–76.
Lu H C, Li P X, Wang D. Visual object tracking: a survey[J]. Pattern Recognit Artif Intell, 2018, 31(1): 61–76.
[4] Bolme D S, Beveridge J R, Draper B A, et al. Visual object tracking using adaptive correlation filters[C]//Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2010: 2544–2550.
[5] Henriques J F, Caseiro R, Martins P, et al. Exploiting the circulant structure of tracking-by-detection with kernels[M]//Fitzgibbon A, Lazebnik S, Perona P, et al. Computer Vision–ECCV 2012. ECCV 2012. Berlin, Heidelberg: Springer, 2012: 702–715.
[6] Henriques J F, Caseiro R, Martins P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Trans Pattern Anal Mach Intell, 2015, 37(3): 583–596. doi: 10.1109/TPAMI.2014.2345390
[7] Bertinetto L, Valmadre J, Golodetz S, et al. Staple: complementary learners for real-time tracking[C]//Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016: 1401–1409.
[8] Li Y, Zhu J K. A scale adaptive kernel correlation filter tracker with feature integration[C]//Agapito L, Bronstein M, Rother C. Computer Vision-ECCV 2014 Workshops. ECCV 2014. Zurich, Switzerland: Springer, 2014: 254–265.
[9] Danelljan M, Häger G, Khan F S, et al. Discriminative scale space tracking[J]. IEEE Trans Pattern Anal Mach Intell, 2017, 39(8): 1561–1575. doi: 10.1109/TPAMI.2016.2609928
[10] Galoogahi H K, Fagg A, Lucey S. Learning background-aware correlation filters for visual tracking[C]//Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), 2017: 1135–1143.
[11] Huang Z Y, Fu C H, Li Y M, et al. Learning aberrance repressed correlation filters for real-time UAV tracking[C]//Proceedings of the 2019 IEEE International Conference on Computer Vision (ICCV), 2019: 2891–2900.
[12] Dai K A, Wang D, Lu H C, et al. Visual tracking via adaptive spatially-regularized correlation filters[C]//Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019: 4670–4679.
[13] 汤学猛, 陈志国, 傅毅. 基于核滤波器实时运动目标的抗遮挡再跟踪[J]. 光电工程, 2020, 47(1): 52–61. doi: 10.12086/oee.2020.190279 http://www.oejournal.org/J/OEE/Article/Details/A200114000020/CN
Tang X M, Chen Z G, Fu Y. Anti-occlusion and re-tracking of real-time moving target based on kernelized correlation filter[J]. Opto-Electron Eng, 2020, 47(1): 52–61. doi: 10.12086/oee.2020.190279 http://www.oejournal.org/J/OEE/Article/Details/A200114000020/CN
[14] 王红雨, 汪梁, 尹午荣, 等. 结合目标检测的多尺度相关滤波视觉跟踪算法[J]. 光学学报, 2019, 39(1): 0115004.
Wang H Y, Wang L, Yin W R, et al. Multi-scale correlation filtering visual tracking algorithm combined with target detection[J]. Acta Opt Sin, 2019, 39(1): 0115004.
[15] 刘万军, 孙虎, 姜文涛. 自适应特征选择的相关滤波跟踪算法[J]. 光学学报, 2019, 39(6): 0615004.
Liu W J, Sun H, Jiang W T. Correlation filter tracking algorithm for adaptive feature selection[J]. Acta Opt Sin, 2019, 39(6): 0615004.
[16] Wu Y, Lim J, Yang M H. Object tracking benchmark[J]. IEEE Trans Pattern Anal Mach Intell, 2015, 37(9): 1834–1848. doi: 10.1109/TPAMI.2014.2388226
[17] Wu Y, Lim J, Yang M H. Online object tracking: a benchmark[C]//Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, 2013: 2411–2418.
[18] Kristan M, Matas J, Leonardis A, et al. The visual object tracking VOT2015 challenge results[C]//Proceedings of the 2015 IEEE International Conference on Computer Vision Workshop (ICCVW), 2015: 1–23.
[19] Danelljan M, Bhat G, Khan F S, et al. ECO: efficient convolution operators for tracking[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017: 6638–6646.
[20] Li Y, Zhu J K, Hoi S C H, et al. Robust estimation of similarity transformation for visual object tracking[C]//Proceedings of 2019 AAAI Conference on Artificial Intelligence (AAAI), 2019, 33: 8666–8673.
[21] Danelljan M, Häger G, Khan F S, et al. Learning spatially regularized correlation filters for visual tracking[C]//Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), 2015: 4310–4318.
[22] Wang M M, Liu Y, Huang Z. Large margin object tracking with circulant feature maps[C]//Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017: 4800–4808.
[23] Danelljan M, Häger G, Khan F S, et al. Accurate scale estimation for robust visual tracking[C]//Proceedings of the British Machine Vision Conference 2014, 2014: 1–11.
[24] Nam H, Baek M, Han B. Modeling and propagating CNNs in a tree structure for visual tracking[EB/OL]. (2016-08-25)[2020-04-08]. https://arxiv.org/abs/1608.07242.
-


 点击扫一扫
点击扫一扫
图(7)
表(3)
计量
- 文章访问数: 4825
- PDF下载数: 1389
- 施引文献: 0


