
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
对于光电跟踪系统来说,图像传感器例如电荷耦合器件(CCD)只能够探测脱靶量即偏差信息,而无法得到目标运动轨迹,所以,大多数情况下在目标跟踪回路不能直接实现前馈控制,这限制了系统的闭环跟踪性能。本文采用了一种基于误差观测器的等效前馈控制方法来提高运动平台光电跟踪系统的跟踪性能。该方法是在原有的反馈控制回路的基础上加入一个观测前馈通路,通过优化前馈滤波器提高闭环性能。由于是基于最终的视觉误差的观测,该方法对目标跟踪和扰动抑制同时起作用,既可以应用到地基跟踪也可以应用于运动平台上。前馈滤波器没有采用简单的一阶低通滤波器而是选择Q31滤波器。仿真和实验表明,与传统控制方法相比,这种基于误差观测器的控制方法能够有效提高系统的低频跟踪性能。
Abstract:For an optic-electro tracking system, an image sensor such as charge-coupled device (CCD) cannot provide target trajectories except for line-of-sight (LOS) error. Thus, it is difficult to achieve direct feedforward control for the tracking loop, which determines the closed-loop performance. An error-based observer (EBO) control of a CCD-based tracking loop is proposed to enhance the tracking performance for an optic-electro tracking system on moving platforms. The EBO control can be plugged into an existing feedback control loop. The closed-loop performance of the CCD-based control system can be improved by optimizing the feedforward filter Q(s). Because this EBO method relies only on the final LOS error, it benefits the control system both in disturbance suppression and target tracking and it can be applied to an optic-electro tracking system in moving platforms as well as in ground platforms. An optimal Q31 filter rather than a low-pass filter is improved for this EBO control. Simulations and experiments show that the tracking performance is effectively enhanced in low frequency compared to traditional control methods.

-

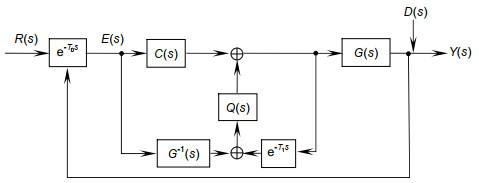
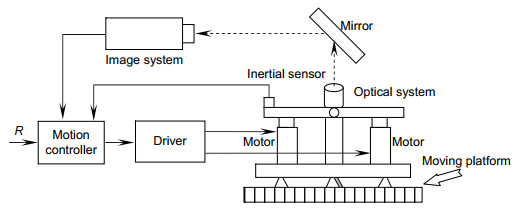
Overview: For an optic-electro tracking system, image sensors (such as CCD) are usually used for monitoring and positioning as well as tracking a target, but they can only detect line-of-sight (LOS) error and cannot provide target trajectories. Therefore, it brings difficulties to the application of feedforward control which is an effective way to improve tracking performance. As a result, recovering the target trajectory through data fusion is an effective way. However, it needs extra sensors and the effectiveness of the equivalent feedforward control method is based on the accuracy of the synthesized feedforward signal which is affected by the measurement accuracy of the sensor and the prediction accuracy. Inaccurate feedforward signal has no improvement in tracking performance and even leads to instability of the control system. When it comes to tracking system on a moving platform, an inertial measurement unit (IMU) is necessary. The attitude accuracy determined by the IMU always plays an import part in tracking performance. Therefore, the equivalent feedforward control method based on data fusion is not applicable in many cases. For traditional feedback control, high control bandwidth facilitates good closed-loop performance. However, the sampling frequency and time delay of the image sensor are the main factors that restrict tracking bandwidth. Simply using a high-gain feedback controller or improving the order of the control system will decrease the dynamic performance of the system, leading to instability. The error-based observer (EBO) control of an image-based tracking loop is proposed to enhance tracking performance for an optic-electro tracking system on the moving platform. This EBO method combines the LOS error and control output to achieve high gain. The equivalent feedforward control can be plugged into the existing feedback control loop. The closed-loop performance of the image-based control system can be improved by optimizing the feedforward filter Q(s). Since this EBO method does not need extra sensors and it benefits the control system in both disturbance suppression and target tracking, it can be applied to both moving platforms and ground platforms. The control structure decided that Q(s) has to be a low-pass filter. In this paper, an optimal three-order Q31 filter rather than a low-pass filter is improved for this EBO control. Simulations and experiments show that the tracking performance of the EBO method is effectively enhanced in the low frequency compared to traditional control methods and an optimal Q31 filter is more efficient than a simple first-order low-pass filter. This improvement is meaningful because better performance in the low frequency is more important than in the high frequency for many cases.
-

-

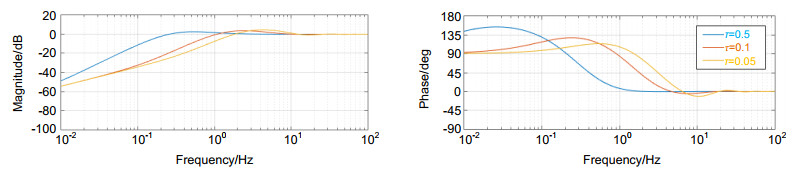
Figure 6. Bode response of the closed-loop transfer function (a) and sensitivity function (b) from simulations
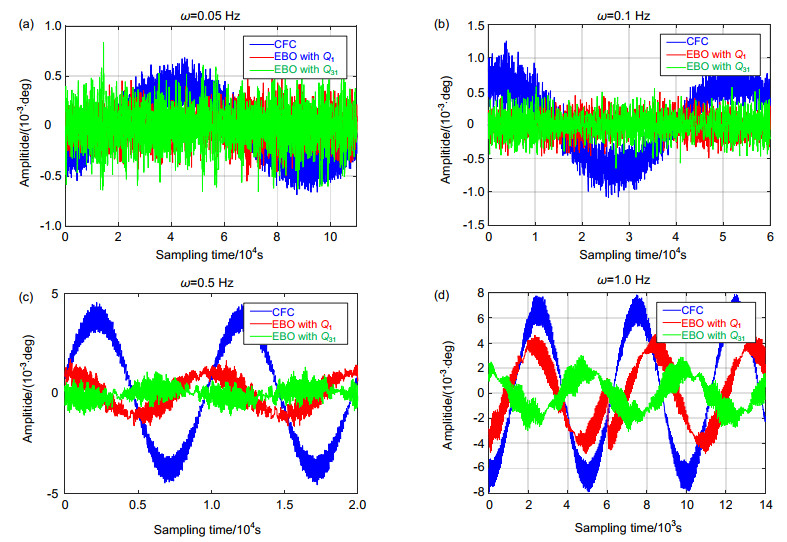
Figure 8. Error comparison of classical feedback control (CFC)(blue) and EBO control with different Q1 filter (red) and with Q31 filter (green) at (a) 0.05 Hz, (b) 0.1 Hz, (c) 0.5 Hz and (d) 1 Hz
表 1 Comparison of gain margin and phase margin among different methods
Method Gain margin/dB Phase margin/dB 1/(0.1s+1) 6 45 Q31(τ=0.1) 4.49 31.2 Q31(τ=0.05) 4.93 32.1  下载: 导出CSV
下载: 导出CSV
-
[1] Beals G A, Crum R C, Dougherty H J, et al. Hubble space telescope precision pointing control system[J]. Journal of Guidance, Control, and Dynamics, 1988, 11(2): 119-123. doi: 10.2514/3.20280
[2] Wang C C, Hu L F, Wang Y K, et al. Time delay compensation method for tip-tilt control in adaptive optics system[J]. Applied Optics, 2015, 54(11): 3383-3388. doi: 10.1364/AO.54.003383
[3] Esmaeili M, Shirvani M. Time delay compensation by A PID controller[C]//2011 IEEE International Conference on System Engineering and Technology, Shah Alam, Malaysia, 2011.
[4] Natori K, Tsuji T, Ohnishi K, et al. Time-delay compensation by communication disturbance observer for bilateral teleoperation under time-varying delay[J]. IEEE Transactions on Industrial Electronics, 2010, 57(3): 1050-1062. doi: 10.1109/TIE.2009.2028337
[5] Huang Y M, Ma J G, Fu C Y. Velocity-forecast filters of theodolite[J]. Proceedings of SPIE, 2003, 5082: 87-93. doi: 10.1117/12.486852
[6] Wei Z H. Feedforward control strategies for tracking performance in machine axes[J]. Chinese Journal of Mechanical Engineering, 2005, 18(1): 5-9. doi: 10.3901/CJME.2005.01.005
[7] Hurák Z, Řezáč M. Combined line-of-sight inertial stabilization and visual tracking: Application to an airborne camera platform[C]//Proceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, Shanghai, 2009.
[8] Deng C, Tang T, Mao Y, et al. Enhanced disturbance observer based on acceleration measurement for fast steering mirror systems[J]. IEEE Photonics Journal, 2017, 9(3): 6802211. http://ieeexplore.ieee.org/document/7904704/
[9] Wu C, Lin Z. Disturbance observer based control system design for inertially stabilized platform[J]. Proceedings of SPIE, 2012, 8542: 85420T. doi: 10.1117/12.974361
[10] Tian J, Yang W S, Peng Z M, et al. Inertial sensor-based multiloop control of fast steering mirror for line of sight stabilization[J]. Optical Engineering, 2016, 55(11): 111602. doi: 10.1117/1.OE.55.11.111602
[11] Luo Y, Huang Y M, Deng C, et al. Combining a disturbance observer with triple-loop control based on MEMS accelerometers for line-of-sight stabilization[J]. Sensors, 2017, 17(11): 2648. doi: 10.3390/s17112648
[12] Luo Y, Mao Y, Ren W, et al. Multiple fusion based on the CCD and MEMS accelerometer for the low-cost multi-loop optoelectronic system control[J]. Sensors, 2018, 18(7): 2153. doi: 10.3390/s18072153
[13] Tang T, Cai H X, Huang Y M, et al. Combined line-of-sight error and angular position to generate feedforward control for a charge-coupled device-based tracking loop[J]. Optical Engineering, 2015, 54(10): 105107. doi: 10.1117/1.OE.54.10.105107
[14] Tang T, Niu S X, Ma J G, et al. A review on control methodologies of disturbance rejections in optical telescope[J]. Opto-Electronic Advances, 2019, 2(10): 190011. doi: 10.29026/oea.2019.190011
[15] 严灵杰, 黄永梅, 张涯辉, 等. RANSAC算法在空间目标光电跟踪中的应用研究[J].光电工程, 2019, 46(11): 180540. doi: 10.12086/oee.2019.180540
Yan L J, Huang Y M, Zhang Y H, et al. Research on the application of RANSAC algorithm in electro-optical tracking of space targets[J]. Opto-Electronic Engineering, 2019, 46(11): 180540. doi: 10.12086/oee.2019.180540
[16] Tang T, Tian J, Zhong D J, et al. Combining charge couple devices and rate sensors for the feedforward control system of a charge coupled device tracking loop[J]. Sensors, 2016, 16(7): 968. doi: 10.3390/s16070968
[17] Kennedy P J, Kennedy R L. Direct versus indirect line of sight (LOS) stabilization[J]. IEEE Transactions on Control Systems Technology, 2003, 11(1): 3-15. doi: 10.1109/TCST.2002.806443
[18] Masten M K. Inertially stabilized platforms for optical imaging systems[J]. IEEE Control Systems Magazine, 2008, 28(1): 47-64. doi: 10.1109/MCS.2007.910201
[19] Zhang W L, Tomizuka M, Wei Y H, et al. Robust time delay compensation in a wireless motion control system with double disturbance observers[C]//Proceedings of the American Control Conference, Chicago, 2015: 5294-5299.
-


 点击扫一扫
点击扫一扫
图(8)
表(1)
计量
- 文章访问数: 3741
- PDF下载数: 555
- 施引文献: 0


