
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Zhao Chunmei, Chen Zhongbi, Zhang Jianlin. Application of aircraft target tracking based on deep learning[J]. Opto-Electronic Engineering, 2019, 46(9): 180261. doi: 10.12086/oee.2019.180261

|
Application of aircraft target tracking based on deep learning
-
Abstract
In this paper, based on muti-domain network (MDNet), fast deep learning for aircraft tracking (FDLAT) algorithm is proposed to track aircraft target. This algorithm uses feature-based transfer learning to make up the inferiority of small sample sets, uses specific data sets to update parameters of convolutional layers and fully connected layers, and use it to distinguish aircraft from background. After building the training model, we put the aircraft video sets into the model and tracked the aircraft using regression model and a simple line on-line update, to increase the speed while ensuring the accuracy. This algorithm achieves robust tracking for aircraft in rotation, similar targets, fuzzy targets, complex environment, scale transformation, target occlusion, morphological transformation and other complex states, and runs at a speed of 20.36 frames with the overlap reached 0.592 in the ILSVRC2015 detection sets of aircraft, basically meets the real-time application requirement of aircraft tracking.-
Keywords:
- FDLAT /
- feature-based transfer learning /
- aircraft target /
- robust tracking /
- real-time tracking
-

-
References
[1] Sivanantham S, Paul N N, Iyer R S. Object tracking algorithm implementation for security applications[J]. Far East Journal of Electronics and Communications, 2016, 16(1): 1–13. doi: 10.17654/EC016010001 [2] Kwak S, Cho M, Laptev I, et al. Unsupervised object discovery and tracking in video collections[C]//Proceedings of 2015 IEEE International Conference on Computer Vision, 2015: 3173–3181. http://www.oalib.com/paper/4075520 [3] 罗海波, 许凌云, 惠斌, 等.基于深度学习的目标跟踪方法研究现状与展望[J].红外与激光工程, 2017, 46(5): 502002. Luo H B, Xu L Y, Hui B, et al. Status and prospect of target tracking based on deep learning[J]. Infrared and Laser Engineering, 2017, 46(5): 502002. [4] Comaniciu D, Ramesh V, Meer P. Kernel-based object tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(5): 564–577. doi: 10.1109/TPAMI.2003.1195991 [5] Jia X, Lu H C, Yang M H. Visual tracking via adaptive structural local sparse appearance model[C]//Proceedings of 2012 IEEE Conference on Computer Vision and Pattern Recognition, 2012: 1822–1829. http://www.researchgate.net/publication/261334218_Visual_tracking_via_adaptive_structural_local_sparse_appearance_model [6] Henriques J F, Caseiro R, Martins P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583–596. doi: 10.1109/TPAMI.2014.2345390 [7] 樊香所, 徐智勇, 张建林.改进粒子滤波的弱小目标跟踪[J].光电工程, 2018, 45(8): 170569. doi: 10.12086/oee.2018.170569 Fan X S, Xu Z Y, Zhang J L. Dim small target tracking based on improved particle filter[J]. Opto-Electronic Engineering, 2018, 45(8): 170569. doi: 10.12086/oee.2018.170569 [8] 奚玉鼎, 于涌, 丁媛媛, 等.一种快速搜索空中低慢小目标的光电系统[J].光电工程, 2018, 45(4): 170654. doi: 10.12086/oee.2018.170654 Xi Y D, Yu Y, Ding Y Y, et al. An optoelectronic system for fast search of low slow small target in the air[J]. Opto-Electronic Engineering, 2018, 45(4): 170654. doi: 10.12086/oee.2018.170654 [9] Krizhevsky A, Sutskever I, Hinton G E. ImageNet classification with deep convolutional neural networks[C]//Proceedings of the 25th International Conference on Neural Information Processing Systems, 2012: 1097–1105. http://www.researchgate.net/publication/267960550_ImageNe [10] Chatfield K, Simonyan K, Vedaldi A, et al. Return of the devil in the details: delving deep into convolutional nets[J]. arXiv: 1405.3531[cs.CV], 2014. [11] Hyeonseob N, Mooyeol B, Bohyung H. Modeling and Propagating CNNs in a Tree Structure for Visual Tracking[J]. arXiv: 1608.07242v1[cs.CV], 2016: 1–10. [12] Shelhamer E, Long J, Darrell T. Fully convolutional networks for semantic segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(4): 640–651. doi: 10.1109/TPAMI.2016.2572683 [13] Girshick R, Donahue J, Darrell T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]//Proceedings of 2014 Conference on Computer Vision and Pattern Recognition, 2014: 580–587. [14] Bertinetto L, Valmadre J, Henriques J F, et al. Fully-convolutional Siamese networks for object tracking[C]//Proceedings of 2016 European Conference on Computer Vision, 2016: 850–865. http://link.springer.com/chapter/10.1007/978-3-319-48881-3_56 [15] Valmadre J, Bertinetto L, Henriques J F, et al. End-to-end representation learning for Correlation Filter based tracking[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition, 2017. http://www.researchgate.net/publication/320971954_End-to-End_Representation_Learning_for_Correlation_Filter_Based_Tracking [16] Nam H, Han B. Learning multi-domain convolutional neural networks for visual tracking[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, 2016: 4293–4302. http://www.oalib.com/paper/4053404 [17] Held D, Thrun S, Savarese S. Learning to track at 100 FPS with deep regression networks[C]//Proceedings of the 14th European Conference on Computer Vision, 2016: 745–765. http://link.springer.com/chapter/10.1007/978-3-319-46448-0_45 [18] Simonyan K, Zisserman A. Very deep convolutional networks for large-scale image recognition[J]. arXiv: 1409.1556[cs.CV], 2014. http://www.oalib.com/paper/4068791 [19] Chen K, Tao W B. Once for all: a two-flow convolutional neural network for visual tracking[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2018, 28(12): 3377–3386. doi: 10.1109/TCSVT.2017.2757061 [20] Leal-Taixé L, Canton-Ferrer C, Schindler C. Learning by tracking: Siamese CNN for robust target association[C]//Proceedings of 2016 Computer Vision and Pattern Recognition Workshops, 2016: 418–425. http://ieeexplore.ieee.org/document/7789549/ [21] Tao R, Gavves E, Smeulders A W M. Siamese instance search for tracking[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, 2016: 1420–1429. http://xueshu.baidu.com/s?wd=paperuri%3A%28cd6b46ac6e7a4082d9c7c7732adcc0e1%29&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http%3A%2F%2Fieeexplore.ieee.org%2Fdocument%2F7780527%2F&ie=utf-8&sc_us=7275013320574764237 [22] Wang N Y, Li S Y, Gupta A, et al. Transferring rich feature hierarchies for robust visual tracking[J]. arXiv: 1501.04587[cs.CV], 2015. http://www.oalib.com/paper/4069892 [23] Zhai M Y, Roshtkhari M J, Mori G. Deep learning of appearance models for online object tracking[J]. arXiv: 1607.02568[cs.CV], 2016. http://www.researchgate.net/publication/305185999_Deep_Learning_of_Appearance_Models_for_Online_Object_Tracking [24] 王慧燕, 杨宇涛, 张政, 等.深度学习辅助的多行人跟踪算法[J].中国图象图形学报, 2017, 22(3): 349–357. Wang H Y, Yang Y T, Zhang Z, et al. Deep-learning-aided multi-pedestrian tracking algorithm[J]. Journal of Image and Graphics, 2017, 22(3): 349–357. [25] 王晓冬.视觉角度对游戏可玩性的影响[J].河南科技, 2014(7): 12. [26] Horikoshi K, Misawa K, Lang K. 20-fps motion capture of phase-controlled wave-packets for adaptive quantum control[C]//Proceedings of the 15th International Conference on Ultrafast Phenomena XV, 2006: 175–177. http://www.springerlink.com/content/n2217125511444v1/ -
Overview

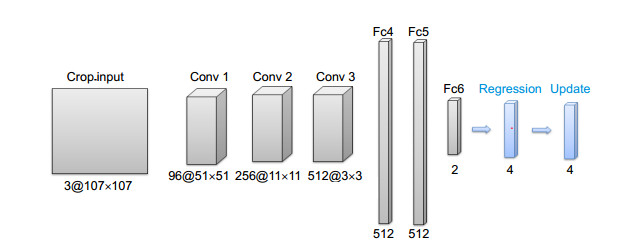
Overview: Deep learning has achieved good results in image classification, semantic segmentation, target detection and recognition. However, it is still restricted by small sample training sets on object tracking. Object tracking is one of the most important research topics in the field of computer vision, and has a wide range of applications. The challenge of object tracking lies in the complex states such as the target rotation, multi target, blur target, complex background, size change, target occlusion, fast moving and so on. In this paper, based on muti-domain network (MDNet), fast deep learning for aircraft tracking (FDLAT) algorithm is proposed to track aircraft target. This algorithm uses feature-based transfer learning to make up the inferiority of small sample sets, uses specific data sets to update parameters of convolutional layers and fully connected layers, and use it to distinguish aircraft from background. After building the training model, we put the aircraft video sets into the model and tracked the aircraft using regression model and a simple line on-line update, to increase the speed while ensuring the accuracy. This algorithm achieves robust tracking for aircraft in rotation, similar targets, fuzzy targets, complex environment, scale transformation, target occlusion, morphological transformation and other complex states. FDLAT is designed for lifting the speed while guaranteeing the precision of tracking. For the application of aircraft tracking, the FDLAT networks is trained by using 3 convolutional layers (Conv1~Conv3 of VGGNets) to extract the feature of aircraft target. Fc6 is a single layer and Fc4~Fc6 are used for the two classifications of aircraft and background, and the outputs are the probability of aircraft and background. In the process of tracking, the trained networks are used as feed-forward networks, and the candidate box of the maximum score of outputs is regressed to get the target location, while on-line updating is done by a simple linear operation. Our FDLAT algorithm is robust in aircraft target tracking, and basically meets the real-time requirements with high accuracy. This algorithm uses convolutional layers for feature extraction and fully connected layers for classification. Then the outputs of the networks perform a regression and location update operation in the testing process, which has good performance for scaling, occlusion, stealth, interference scene and covers the shortage of MDNet. A speed of 20.36 frames with the overlap reached 0.592 is achieved in the ILSVRC2015 detection sets of aircraft, basically meets the requirement of real-time for aircraft target tracking application.
-
Access History

Export File
Citation
Zhao Chunmei, Chen Zhongbi, Zhang Jianlin. Application of aircraft target tracking based on deep learning[J]. Opto-Electronic Engineering, 2019, 46(9): 180261. doi: 10.12086/oee.2019.180261
Format
Content
 DownLoad:
DownLoad:

-
Figure 1.
Feedforward network of FDLAT
-
Figure 2.
Qualitatively comparison between FDLAT and MDNet.
-
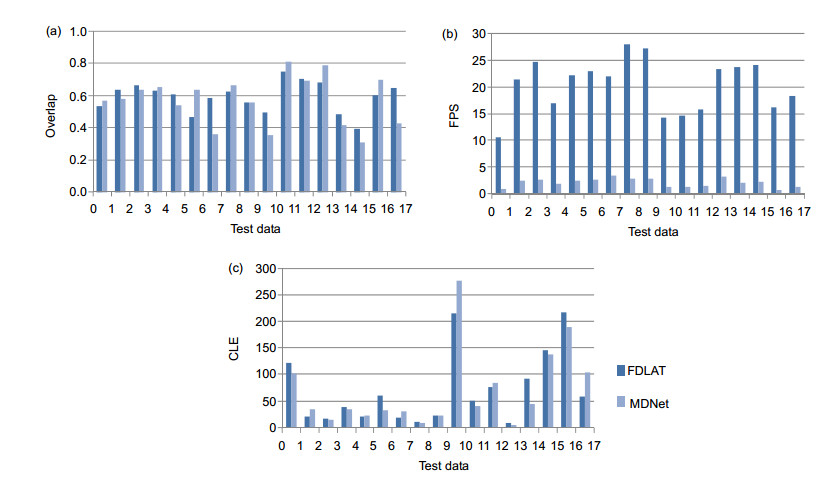
Figure 3.
Qualitative analysis of evaluation index.


