
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
激光雷达可以高精度、高准确度地获取目标的距离、速度等信息或者实现目标成像,在测绘、导航等领域具有重要作用。本文首先介绍了从机械式向全固态过渡的微机械系统激光雷达解决方案;其次针对激光雷达全固态的发展需求,介绍了面阵闪光、相控阵激光雷达的基本原理和典型实现方法,从液晶、光波导材料等研究方向阐述相控阵激光雷达研究现状;最后总结了目前激光雷达存在的问题及不同的解决方案,并对未来发展趋势进行了展望。
Abstract:Light detection and ranging (LiDAR) system can be used to capture the distances and speeds of the targets with high resolution and high accuracy, and can also form imaging. It is important for the applications such as mapping, and navigation, et al. This paper introduces the LiDAR solution based on micro-electromechanical system (MEMS) is a transitional scheme from mechanical one to solid-state. Meanwhile, in terms of the requirement of solid-state, the principles of Flash and optical phased array LiDAR are introduced in this paper. At the same time, the miniaturization trend of LiDAR is presented with optical phased array based on liquid crystal (LC) and integrated optical waveguides. At last, the performances and open issues of the solutions for LiDAR are concluded and the development trends of LiDAR are summarized with outlook.
-
Key words:
- LiDAR /
- MEMS /
- Flash /
- optical phased array
-

Overview: Radar is utilized as the eyes to have the sense of the world for human, which has the ability to detect the target in dead zone and long distance. It plays a significant role in the military and civilian domains. Light detection and ranging (LiDAR) system has the shorter wavelength than that of the traditional radar. Thus, LiDAR systems have higher resolutions of distance, angle, and speed compared with the radar system. Due to the high direction and high coherence of laser, LiDAR systems can realize detection and ranging of the remote targets without external interference. The information of distance and speed can be obtained with coherent detection of LiDAR, which can be used in the fields such as missile guidance, mapping, driverless technology and so on.
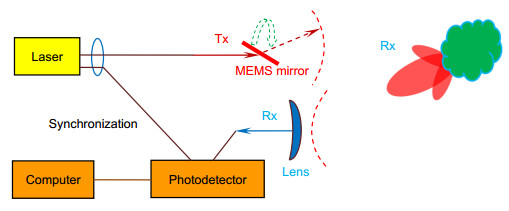
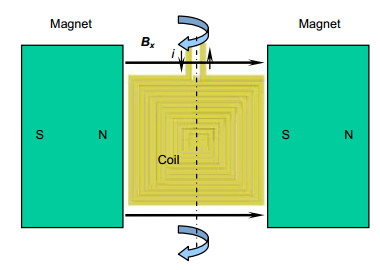
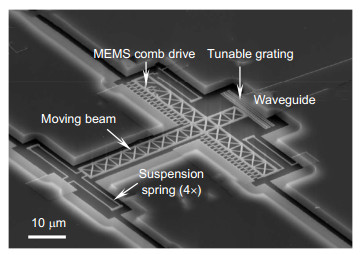
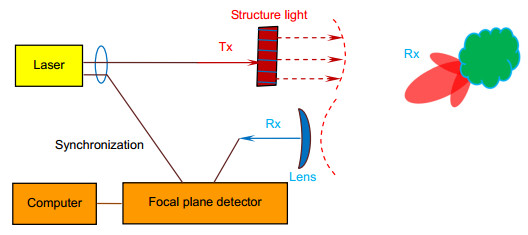
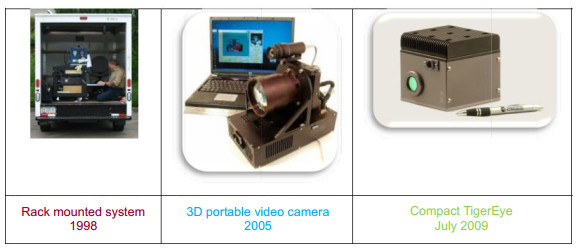
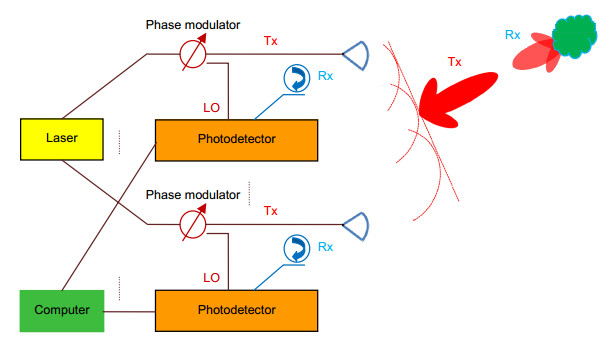
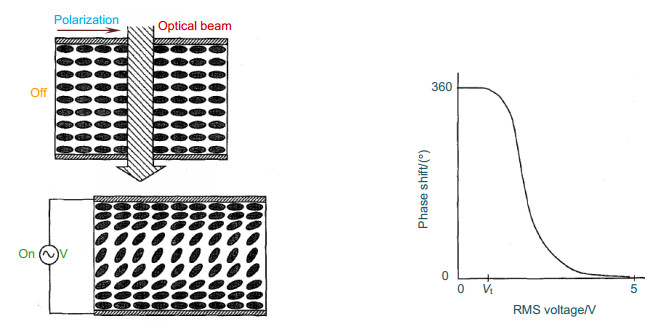
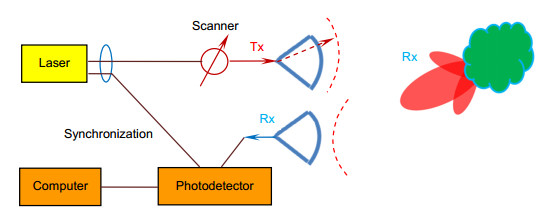
LiDAR can be classified as three types: mechanical, mixed solid-state, and solid-state. The mechanical LiDAR systems utilize the mechanically rotating parts to realize beam steering, of which the field of view is large but the assembly is complexed and the scanning speed is low. The solid-state LiDAR systems are without mechanical scanners and can be realized by the micro-electromechanical system (MEMS), Flash and optical phased array (OPA) technologies. MEMS based LiDAR realizes the beam scanning with micro mirror. The MEMS mirrors can be actuated by electrostatic method, electromagnetic method, piezoelectric method, and electrothermal method. The integration of the MEMS system is relatively high but the field of view is limited by the displacement of the micro mirror. Flash based solid-state LiDAR is proposed in 1990s, the techniques of which are relatively mature and have commercial applications. However, the detection range and field of view are limited. OPA emerged in 1970s is a novel optical beam scanning technology, which is based on principles and techniques of the microwave phased array. The OPAs realize beam steering based on the principle of changing the optical phase in the array unit, which will modulate the wavefronts of the emission beam. The OPA beam scanners are non-inertia, precision, accurate and have the potential to be utilized in the LiDAR field. The technique is emerging with liquid crystal (LC) and integrated optical waveguides and so on. The OPAs with high integration can satisfy the requirements of the miniaturization trends in some driverless fields. In the future, the LiDAR will develop on the way to the solid state and miniaturization trend.
In this paper, we review the recent research of OPA LiDAR systems in Section 2, the basic working principle of LiDAR system is introduced. In Section 3, the technique researches of MEMS based LiDAR are introduced. In Section 4, the principle and research of Flash LiDAR are introduced. The LC OPA and integrated waveguide OPAs for LiDAR, including the electro-optic materials, silicon-on-insulator (SOI) platform and so on, are introduced in Section 5. The performances of the techniques are compared and the open issues and outlook are given in the Section 6.
-

-
-
[1] Hauchecorne A, Chanin M L. Density and temperature profiles obtained by lidar between 35 and 70 km[J]. Geophysical Research Letters, 1980, 7(8): 565–568. doi: 10.1029/GL007i008p00565
[2] Koch G J, Barnes B W, Petros M, et al. Coherent differential absorption lidar measurements of CO2[J]. Applied Optics, 2004, 43(26): 5092–5099. doi: 10.1364/AO.43.005092
[3] Schwarz B. LIDAR: Mapping the world in 3D[J]. Nature Photonics, 2010, 4(7): 429–430. doi: 10.1038/nphoton.2010.148
[4] Collis R T H, Russell P B. Lidar measurement of particles and gases by elastic backscattering and differential absorption[M]//Hinkley E D. Laser Monitoring of the Atmosphere. Berlin, Heidelberg: Springer, 1976: 71–151.
[5] Gschwendtner A B, Keicher W E. Development of coherent laser radar at Lincoln Laboratory[J]. Lincoln Laboratory Journal, 2000, 12(2): 383–396. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=h0mYEcbt1nFPrFS1PS5jzfkdkVBOUriFh1zUlKq5630=
[6] Niclass C, Ito K, Soga M, et al. Design and characterization of a 256x64-pixel single-photon imager in CMOS for a MEMS-based laser scanning time-of-flight sensor[J]. Optics Express, 2012, 20(11): 11863–11881. doi: 10.1364/OE.20.011863
[7] McCarthy A, Ren X M, Della Frera A, et al. Kilometer-range depth imaging at 1550 nm wavelength using an InGaAs/InP single-photon avalanche diode detector[J]. Optics Express, 2013, 21(19): 22098–22113. doi: 10.1364/OE.21.022098
[8] Heck M J R. Highly integrated optical phased arrays: photonic integrated circuits for optical beam shaping and beam steering[J]. Nanophotonics, 2017, 6(1): 93–107.
[9] Nee J T, Conant R A, Muller R S, et al. Lightweight, optically flat micromirrors for fast beam steering[C]//Proceedings of 2000 IEEE/LEOS International Conference on Optical MEMS, 2000: 9–10.
[10] Xu Y S, Singh J, Selvaratnam T, et al. Two-axis gimbal-less electrothermal micromirror for large-angle circumferential scanning[J]. IEEE Journal of Selected Topics in Quantum Electronics, 2009, 15(5): 1432–1438. doi: 10.1109/JSTQE.2009.2016436
[11] Koh K H, Lee C. A low power 2-D raster scanning MEMS mirror driven by hybrid electrothermal and electromagnetic actuation mechanisms[C]//Proceedings of 2012 International Conference on Optical MEMS and Nanophotonics, 2012: 236–237.
[12] Urey H. MEMS scanners for display and imaging applications[J]. Proceedings of SPIE, 2004, 5604: 218–229. doi: 10.1117/12.580450
[13] Uchino K. Piezoelectric actuators 2006[J]. Journal of Electroceramics, 2008, 20(3–4): 301–311. doi: 10.1007/s10832-007-9196-1
[14] Tani M, Akamatsu M, Yasuda Y, et al. A combination of fast resonant mode and slow static deflection of SOI-PZT actuators for MEMS image projection display[C]//Proceedings of 2006 IEEE/LEOS International Conference on Optical MEMS and Their Applications Conference, 2006: 25–26.
[15] Chu H M, Hane K. Design, fabrication and vacuum operation characteristics of two-dimensional comb-drive micro-scanner[J]. Sensors and Actuators A: Physical, 2011, 165(2): 422–430. doi: 10.1016/j.sna.2010.11.004
[16] Errando-Herranz C, Le Thomas N, Gylfason K B. Low-power optical beam steering by microelectromechanical waveguide gratings[J]. Optics Letters, 2019, 44(4): 855–858. doi: 10.1364/OL.44.000855
[17] Hofmann U, Senger F, Soerensen F, et al. Biaxial resonant 7mm-MEMS mirror for automotive LIDAR application[C]//Proceedings of 2012 International Conference on Optical MEMS and Nanophotonics, 2012: 150–151.
[18] Sandner T, Wildenhain M, Gerwig C, et al. Large aperture MEMS scanner module for 3D distance measurement[J]. Proceedings of SPIE, 2010, 7594: 75940D. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=CC0210171665
[19] Senger F, Hofmann U, Von Wantoch T, et al. Centimeter-scale MEMS scanning mirrors for high power laser application[J]. Proceedings of SPIE, 2015, 9375: 937509. doi: 10.1117/12.2079600
[20] Jung I W, Krishnamoorthy U, Solgaard O. High fill-factor two-axis gimbaled tip-tilt-piston micromirror array actuated by self-aligned vertical electrostatic combdrives[J]. Journal of Microelectromechanical Systems, 2006, 15(3): 563–571. doi: 10.1109/JMEMS.2006.876666
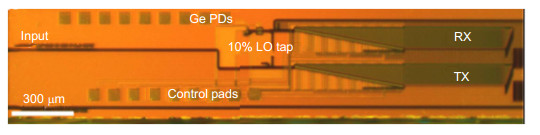
[21] Yang W J, Sun T B, Rao Y, et al. High speed optical phased array using high contrast grating all-pass filters[J]. Optics Express, 2014, 22(17): 20038–20044. doi: 10.1364/OE.22.020038
[22] Anthes J P, Garcia P, Pierce J T, et al. Nonscanned ladar imaging and applications[J]. Proceedings of SPIE, 1993, 1936: 11–22. doi: 10.1117/12.157111
[23] Stettner R. Compact 3D flash lidar video cameras and applications[J]. Proceedings of SPIE, 2010, 7684: 768405. doi: 10.1117/12.851831
[24] Natale D J, Tutwiler R L, Baran M S, et al. Using full motion 3D Flash LIDAR video for target detection, segmentation, and tracking[C]//Proceedings of 2010 IEEE Southwest Symposium on Image Analysis & Interpretation, 2010: 21–24.
[25] Amzajerdian F, Vanek M, Petway L, et al. Utilization of 3D imaging flash lidar technology for autonomous safe landing on planetary bodies[J]. Proceedings of SPIE, 2010, 7608: 760828. doi: 10.1117/12.843324
[26] Ramond T, Saiki E, Weimer C, et al. Topographic mapping flash lidar for multiple scattering, terrain, and forest mapping[J]. Proceedings of SPIE, 2011, 8037: 803710. doi: 10.1117/12.884145
[27] Stettner R, Bailey H, Richmond R D. Eye-safe laser radar 3D imaging[J]. Proceedings of SPIE, 2004, 5412: 111–117. doi: 10.1117/12.553992
[28] Stettner R, Bailey H, Silverman S. Large format time-of-flight focal plane detector development[J]. Proceedings of SPIE, 2005, 5791: 288–292. doi: 10.1117/12.609692
[29] Marino R M, Stephens T, Hatch R E, et al. A compact 3D imaging laser radar system using Geiger-mode APD arrays: system and measurements[J]. Proceedings of SPIE, 2003, 5086: 1–15. doi: 10.1117/12.501581
[30] Aull B F, Schuette D R, Young D J, et al. A study of crosstalk in a 256×256 photon counting imager based on silicon geiger-mode avalanche photodiodes[J]. IEEE Sensors Journal, 2015, 15(4): 2123–2132. doi: 10.1109/JSEN.2014.2368456
[31] Jack M, Chapman G, Edwards J, et al. Advances in ladar components and subsystems at Raytheon[J]. Proceedings of SPIE, 2012, 8353: 83532F. doi: 10.1117/12.923683
[32] Zhang P, Du X P, Zhao J G, et al. High resolution flash three-dimensional LIDAR systems based on polarization modulation[J]. Applied Optics, 2017, 56(13): 3889–3894. doi: 10.1364/AO.56.003889
[33] Jo S, Kong H J, Bang H, et al. High resolution three-dimensional flash LIDAR system using a polarization modulating Pockels cell and a micro-polarizer CCD camera[J]. Optics Express, 2016, 24(26): A1580–A1585. doi: 10.1364/OE.24.0A1580
[34] McManamon P F, Dorschner T A, Corkum D L, et al. Optical phased array technology[J]. Proceedings of the IEEE, 1996, 84(2): 268–298. doi: 10.1109/5.482231
[35] Engström D, O'Callaghan M J, Walker C, et al. Fast beam steering with a ferroelectric-liquid-crystal optical phased array[J]. Applied Optics, 2009, 48(9): 1721–1726. doi: 10.1364/AO.48.001721
[36] Meyer R A. Optical beam steering using a multichannel lithium tantalate crystal[J]. Applied Optics, 1972, 11(3): 613–616. doi: 10.1364/AO.11.000613
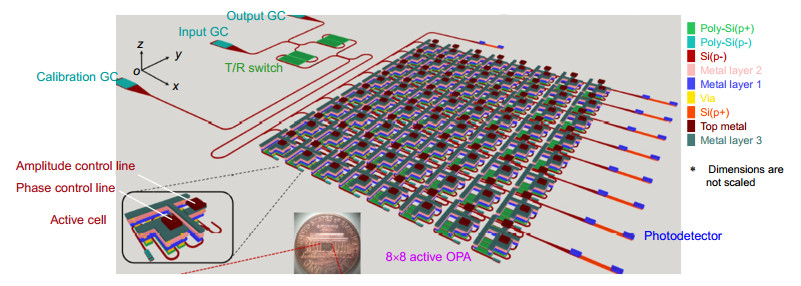
[37] Chung S, Abediasl H, Hashemi H. A monolithically integrated large-scale optical phased array in silicon-on-insulator CMOS[J]. IEEE Journal of Solid-State Circuits, 2018, 53(1): 275–296. doi: 10.1109/JSSC.2017.2757009
[38] Sun J, Hosseini E S, Yaacobi A, et al. Two-dimensional apodized silicon photonic phased arrays[J]. Optics Letters, 2014, 39(2): 367–370. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0231986671/
[39] Poulton C V, Yaacobi A, Cole D B, et al. Coherent solid-state LIDAR with silicon photonic optical phased arrays[J]. Optics Letters, 2017, 42(20): 4091–4094. doi: 10.1364/OL.42.004091
[40] Martin A, Dodane D, Leviandier L, et al. Photonic integrated circuit-based FMCW coherent LiDAR[J]. Journal of Lightwave Technology, 2018, 36(19): 4640–4645. doi: 10.1109/JLT.2018.2840223
[41] Abediasl H, Hashemi H. Monolithic optical phased-array transceiver in a standard SOI CMOS process[J]. Optics Express, 2015, 23(5): 6509–6519. doi: 10.1364/OE.23.006509
-
 下载:
下载:

 点击扫一扫
点击扫一扫
图(16)
表(1)
计量
- 文章访问数: 16923
- PDF下载数: 6650
- 施引文献: 0


