
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
为提升TLD目标跟踪算法的处理速度,以达到在更高分辨率视频中跟踪目标的实时性要求,在TLD算法框架的基础上,提出了一种基于动态捕获区域的TLD目标跟踪算法(DC-TLD)。算法采用前一帧目标位置作为当前帧目标位置的预测值,减小了目标位置的预测误差。研究了检测区域负样本出现需满足的条件,分析了检测区域大小对算法鲁棒性的影响。针对样本的访问方式,提出基于索引的访问方法,极大地减少了访问时间。实验结果表明,该方法不仅有效降低了TLD算法的样本检测时间,而且提高了算法的鲁棒性。
 Abstract:
Abstract:In order to improve the ability of processing video image with high frame rate and meet the real-time requirement in higher resolution video tracking goal, DC-TLD target tracking algorithm, which is based on TLD algorithm and the theory of capturing sample dynamically, is proposed. Firstly, DC-TLD takes the target location of the previous frame as the predicted value of the current frame. Secondly, it calculates the threshold r of negative samples for ensuring that the number of negative samples is sufficient. Thirdly, it accesses the samples by index. The results of experiments show that DC-TLD is more robust and more efficient.
-
Key words:
- target tracking /
- tracking-learning-detection /
- dynamic capture /
- negative sample /
- index access
-

Overview: The target tracking technology based on computer vision is widely used in civil and military fields, such as traffic monitoring, security monitoring, uav tracking and human-computer interaction. However, target tracking is hardly applied to the actual scene. The main reasons are as followed. To begin with, target may suffer from deformation, illumination variation and background clutter during the tracking, which will make the tracking system lose the target. What's more, target may be vague due to the fast motion. Last but not least, target may be blocked by something. In addition, many target tracking algorithms are too complicated to complete real-time tracking.
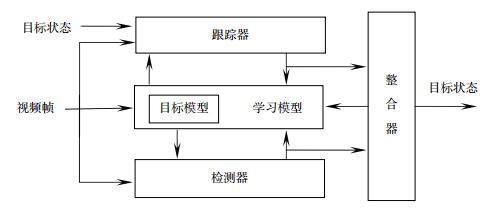
The tracking-learning-detection algorithm is a new single-target long time tracking algorithm proposed by Zdenek Kalal. The tracking-learning-detection (TLD) algorithm is different with the algorithm which is based on the conventional tracking algorithm. The TLD algorithm combines the tracking algorithm and the detection algorithm to solve the problem about the shape change, fast moving and partial shade of the target during the tracking. At the same time, the target model and related parameters of tracking module and detection module are constantly updated through online learning module, which makes the tracking effect more stable, robust and reliable. However, TLD target tracking algorithm has high complexity and it is difficult to achieve the real-time effect of target tracking. Because the TLD algorithm has good robustness and is suitable for application to actual tracking process, this paper studies how to improve and optimize the TLD algorithm.
By analyzing the characteristics of the TLD algorithm, this paper proposes DC-TLD target tracking algorithm based on dynamic capture region. Firstly, by changing the target location prediction method, the position of the previous frame is used to predict the position of the target in the current frame, which will reduce the detection time of the target sample. Secondly, the sample selection method is improved to obtain enough positive and negative samples in the small sample selection. Thirdly, the sample access method is improved by numbering the sample, and the access speed of the sample is improved by index access. The above measures successfully reduce the complexity of the TLD target tracking algorithm and improve the robustness of the algorithm, which make the algorithm closer to real-time requirements. However, when the tracking target is large, the tracking effect is similar as DC-TLD algorithm and TLD algorithm. And it is hard for DC-TLD to track multiple targets.
-

-
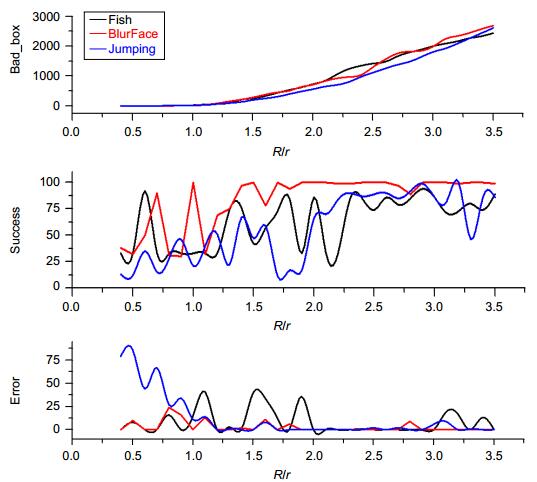
图 6 R/r和跟踪成功率、失败率及负样本数的关系
Figure 6. R/r and tracking success rate, failure rate, negative sample size relationship
表 1 重叠率方法和索引访问方法运行时间对比
Table 1. Overlap ratio method and index access method running time comparison
测试集 重叠率选取样本数No 索引访问选取样本数Ni 重叠率耗时To/ms 索引访问耗时Ti/ms 加速比γ Crowds 2523 5278 2.79 0.0282 207 Football 3069 4054 2.87 0.0221 172 Human6 2861 7608 3.15 0.0597 140 Walking 3849 14000 3.55 0.0741 174  下载: 导出CSV
下载: 导出CSV
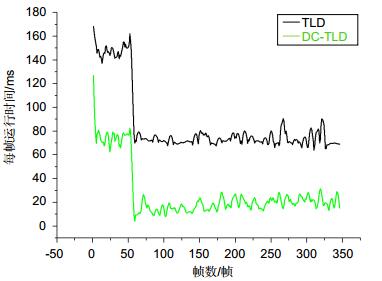
表 2 视频测试实验跟踪时间结果
Table 2. Results of video test tracking time
测试集 视频帧数 TLD/ms DC-TLD/ms Crowds 347 85.42 27.47 Football 312 104.37 55.28 Jumping 313 45.16 20.34 Walking 412 149.63 76.47 Fish 475 71.22 34.43 BlurFace 493 130.30 73.85
下载: 导出CSV
表 3 测试视频精确度
Table 3. Test video accuracy
测试集 视频帧数 TLD成功跟踪帧数 DC-TLD成功跟踪帧数 Crowds 347 76 232 Football 312 286 288 Jumping 313 217 309 Walking 412 412 412 Fish 475 399 448 BlurFace 493 493 493
下载: 导出CSV
-
[1] 程卫亮, 王向军, 万子敬, 等.压缩域目标跟踪算法在小型化DSP平台上的研究与实现[J].光电工程, 2017, 44(10): 972–982. doi: 10.3969/j.issn.1003-501X.2017.10.005
Cheng W L, Wang X J, Wan Z J, et al. Research and implementation of target tracking algorithm in compression domain on miniaturized DSP platform[J]. Opto-Electronic Engineering, 2017, 44(10): 972–982. doi: 10.3969/j.issn.1003-501X.2017.10.005
[2] Henriques J F, Rui C, Martins P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583–596. doi: 10.1109/TPAMI.2014.2345390
[3] Nam H, Han B. Learning multi-domain convolutional neural networks for visual tracking[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 4293–4302.
http://ieeexplore.ieee.org/document/7780834/ [4] Nam H, Baek M, Han B. Modeling and propagating CNNs in a tree structure for visual tracking[EB/OL]. https://arxiv.org/abs/1608.07242v1, 2016.
[5] Kalal Z, Mikolajczyk K, Matas J. Tracking-learning-detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(7): 1409–1422. doi: 10.1109/TPAMI.2011.239
[6] Hare S, Saffari A, Torr P H S. Struck: structured output tracking with kernels[C]//Proceedings of 2011 IEEE International Conference on Computer Vision. Barcelona, Spain: IEEE, 2012: 263–270.
http://ieeexplore.ieee.org/xpls/abs_all.jsp%3Farnumber%3D6126251 [7] Brox T, Bruhn A, Papenberg N, et al. High accuracy optical flow estimation based on a theory for warping[C]//Proceedings of 2004 Computer Vision-ECCV. Berlin, Heidelberg: Springer, 2004: 25–36.
http://link.springer.com/10.1007/978-3-540-24673-2_3 [8] Kalal Z, Mikolajczyk K, Matas J. Forward-backward error: automatic detection of tracking failures[C]//Proceedings of 2010 20th International Conference on Pattern Recognition. Istanbul, Turkey: IEEE, 2010: 2756–2759.
http://doi.ieeecomputersociety.org/10.1109/ICPR.2010.675 [9] Viola P, Jones M. Rapid object detection using a boosted cascade of simple features[C]//Proceedings of 2011 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Kauai: IEEE, 2003.
http://doi.ieeecomputersociety.org/10.1109/CVPR.2001.990517 [10] Kalal Z, Matas J, Mikolajczyk K. P-N learning: bootstrapping binary classifiers by structural constraints[C]//Proceedings of 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Francisco: IEEE, 2014: 49–56.
http://doi.ieeecomputersociety.org/10.1109/CVPR.2010.5540231 [11] 江博. 基于Kalman的TLD目标跟踪算法研究[D]. 西安: 西安科技大学, 2013.
Jiang B. Research on TLD algorithm based on Kalman filter[D]. Xi'an: Xi'an University of Science and Technology, 2013.
http://cdmd.cnki.com.cn/Article/CDMD-10704-1014000315.htm [12] 王美健, 吴小俊.适于非线性机动目标跟踪的新IMM平滑算法[J].光电工程, 2016, 43(10): 18–24. doi: 10.3969/j.issn.1003-501X.2016.10.004
Wang M J, Wu X J. New IMM smoothing algorithm suitable for nonlinear maneuvering target tracking[J]. Opto-Electronic Engineering, 2016, 43(10): 18–24. doi: 10.3969/j.issn.1003-501X.2016.10.004
[13] Wu Y, Lim J, Yang M H. Object tracking benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1834–1848. doi: 10.1109/TPAMI.2014.2388226
-



 点击扫一扫
点击扫一扫
图(10)
表(3)
计量
- 文章访问数: 7143
- PDF下载数: 2780
- 施引文献: 0


