
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Chen Xin, Liang Yang, Zhijiang Hu, et al. Microtube fabrication based on femtosecond Bessel beam and its flexible driving with external magnetic field[J]. Opto-Electronic Engineering, 2017, 44(12): 1180-1186. doi: 10.3969/j.issn.1003-501X.2017.12.005

|
Microtube fabrication based on femtosecond Bessel beam and its flexible driving with external magnetic field
-
Abstract
Microtube, with simple and uniform geometry, is one of the basic structures in micro/nano field. We present a method for the fabrication of magnetic drivable microtubes, by direct femtosecond laser writing combined with magnetron sputtering with metal layer. Femtosecond laser beam is modulated into Bessel beam with spatial light modulator (SLM), and then Bessel beam is focused with a high numerical aperture objective. Microtubes are fabricated by scanning focused femtosecond Bessel beam in a sample anchored on a three dimension stage. Followed by magnetron sputtering a nickel layer, the microtubes exhibit supermagnetic property and can be flexibly driven by external magnetic field. In this study, the propagation and high numerical aperture focusing properties of femtosecond Bessel beams are investigated. Microtubes, with well controlled diameter, length and distribution are efficiently fabricated. Rapid steering of nickel coated microtubes along specific route in fluid environment with external magnetic field has been realized. The steering of microtubes can be realized in various fluid environments. This method is flexible, controllable and efficient and the fabricated drivable microtubes have a promising applications in noninvasive surgery, targeted drug delivery, bioimaging or biosensing and microenvironment cleaning.-
Keywords:
- microtube /
- spatial light modulation /
- Bessel beam /
- magnetic driving
-

-
References
[1] Xi Wang, Solovev A A, Ananth A N, et al. Rolled-up magnetic microdrillers: towards remotely controlled minimally invasive surgery[J]. Nanoscale, 2013, 5(4): 1294-1297. doi: 10.1039/C2NR32798H [2] Kagan D, Benchimol M J, Claussen J C, et al. Acoustic droplet vaporization and propulsion of perfluorocarbon-loaded microbullets for targeted tissue penetration and deformation[J]. Angewandte Chemie International Edition, 2012, 124(30): 7637-7640. [3] Li Jinxing, Thamphiwatana S, Liu Wenjuan, et al. Enteric micromotor can selectively position and spontaneously propel in the gastrointestinal tract[J].ACS Nano, 2016, 10(10): 9536-9542. doi: 10.1021/acsnano.6b04795 [4] Gao Wei, Kagan D, Pak O S, et al. Cargo-towing fuel-free magnetic nanoswimmers for targeted drug delivery[J]. Small, 2012, 8(3): 460-467. doi: 10.1002/smll.201101909 [5] Yang Liang, Ji Shengyun, Xie Kenan, et al. High efficiency fabrication of complex microtube arrays by scanning focused femtosecond laser Bessel beam for trapping/releasing biological cells[J]. Optics Express, 2017, 25(7): 8144–8157. doi: 10.1364/OE.25.008144 [6] Kim S, Qiu Famin, Kim S, et al. Fabrication and characterization of magnetic microrobots for three-dimensional cell culture and targeted transportation[J]. Advanced Materials, 2013, 25(41): 5863-5868. doi: 10.1002/adma.201301484 [7] Vilela D, Parmar J, Zeng Yongfei, et al. Graphene-based microbots for toxic heavy metal removal and recovery from water[J]. Nano Letters, 2016, 16(4): 2860–2866. doi: 10.1021/acs.nanolett.6b00768 [8] Zhao Guanjia, Sanchez S, Schmidt O G, et al. Poisoning of bubble propelled catalytic micromotors: the chemical environment matters[J]. Nanoscale, 2013, 5(7): 2909-2914. doi: 10.1039/c3nr34213a [9] Solovev A A, Mei Yongfeng, Bermúdez Urena E, et al. Catalytic microtubular jet engines self-propelled by accumulated gas bubbles[J]. Small, 2009, 5(14): 1688-1692. doi: 10.1002/smll.v5:14 [10] Solovev A A, Xi Wang, Gracias D H, et al. Self-propelled nanotools[J]. ACS Nano, 2012, 6(2): 1751-1756. doi: 10.1021/nn204762w [11] Sitt A, Soukupova J, Miller D, et al. Microscale rockets and picoliter containers engineered from electrospun polymeric microtubes[J]. Small, 2016, 12(11): 1432-1439. doi: 10.1002/smll.v12.11 [12] Stankevicius E, Gertus T, Rutkauskas M, et al. Fabrication of micro-tube arrays in photopolymer SZ2080 by using three different methods of a direct laser polymerization technique[J]. Journal of Micromechanics and Microengineering, 2012, 22(6): 065022. doi: 10.1088/0960-1317/22/6/065022 [13] Sattayasamitsathit S, Kou Huanhuan, Gao Wei, et al. Fully loaded micromotors for combinatorial delivery and autonomous release of cargoes[J]. Small, 2014, 10(14): 2830-2833. doi: 10.1002/smll.201303646 [14] Gao Wei, Dong Rengfeng, Thamphiwatana S, et al. Artificial micromotors in the mouse's stomach: A step toward in vivo use of synthetic motors[J]. ACS Nano, 2015, 9(1): 117-123. doi: 10.1021/nn507097k [15] Solovev A A, Smith E J, Bof' Bufon C C, et al. Light-controlled propulsion of catalytic microengines[J]. Angewandte Chemie International Edition, 2011, 50(46): 10875-10878. doi: 10.1002/anie.v50.46 [16] Sharma R, Velev O D. Remote steering of self-propelling microcircuits by modulated electric field[J]. Advanced Functional Materials, 2015, 25(34): 5512-5519. doi: 10.1002/adfm.201502129 [17] Balk A L, Mair L O, Mathai P P, et al. Kilohertz rotation of nanorods propelled by ultrasound, traced by microvortex advection of nanoparticles[J]. ACS Nano, 2014, 8(8): 8300-8309. doi: 10.1021/nn502753x [18] Tottori S, Zhang Li, Qiu Famin, et al. Magnetic helical micromachines: fabrication, controlled swimming, and cargo transport[J]. Advanced Materials, 2012, 24(6): 811-816. doi: 10.1002/adma.201103818 [19] Servant A, Qiu Famin, Mazza M, et al. Controlled in vivo swimming of a swarm of bacteria-like microrobotic flagella[J]. Advanced Materials, 2015, 27(19): 2981-2988. doi: 10.1002/adma.201404444 [20] 林培秋, 王辉, 庞辉.基于液晶空间光调制器的相息图扫描三维成像[J].光电工程, 2010, 37(3): 138-143. Lin Peiqiu, Wang Hui, Pang Hui. Scanning three-dimensional image with kinoform based on liquid crystal spatial light modulation[J]. Opto-Electronic Engineering, 2010, 37(3): 138-143. [21] 饶生龙, 吴培超, 张晨初, 等.基于空间光调制器的能量可控飞秒激光加工[J].中国激光, 2017, 44(1): 0102008. Rao Shenglong, Wu Peichao, Zhang Chenchu, et al. Energy-controllable femtosecond laser fabrication based on spatial light modulator[J]. Chinese Journal of Lasers, 2017, 44(1): 0102008. [22] Bhuian B, Winfield R J, O'Brien S, et al. Pattern generation using axicon lens beam shaping in two-photon polymerisation[J]. Applied Surface Science, 2007, 254(4): 841-844. doi: 10.1016/j.apsusc.2007.08.071 [23] Mhanna R, Qiu Famin, Zhang Li, et al. Artificial bacterial flagella for remote-controlled targeted single-cell drug delivery[J]. Small, 2014, 10(10): 1953-1957. doi: 10.1002/smll.201303538 [24] Ding Yun, Qiu Famin, Solvas X C I, et al. Microfluidic-based droplet and cell manipulations using artificial bacterial flagella[J]. Micromachines, 2016, 7(2): 25. doi: 10.3390/mi7020025 -
Overview

Microtube, with simple and uniform geometry, is one of the basic structures in micro/nano field. Mircotube is widely used in the fields of microoptics, biomedical devices, microfluidics, micropumps, microsensors and micromotors, especially magnetically driven motors are envisioned to be involved in various tasks such as directed drug delivery, isolation of biological targets, microsurgery, bioassay, bioimaging, environmental monitoring, remediation processes, and so on. But current fabrication methods such as self-rolling of organic or inorganic films, accumulation of nanoparticles, mask-based diffraction lithography and holographic lithography are only suitable for the preparation of microtubes with certain periodic or specific profiles due to the limitation of inherent fabrication principles, and thus suffered from low flexibility and weak designability. We present a method for the fabrication of magnetic drivable microtubes, by direct femtosecond laser writing combined with magnetron sputtering with metal layer. Femtosecond laser beam is modulated into Bessel beam with spatial light modulator (SLM), and then Bessel beam is focused with a high numerical aperture objective. Microtubes are fabricated by scanning focused femtosecond Bessel beam, a circular beam pattern, in a sample anchored on a three dimension stage. This technology keeps the high resolution of two-photon polymerization and greatly reduces the consumed time by two magnitudes. Followed by magnetron sputtering a nickel layer, the microtubes exhibit paramagnetic property and can be flexibly driven by external magnetic field. The propagation and high numerical aperture focusing properties of femtosecond Bessel beams are investigated, which constructs a solid base for the fabrication parameters optimization. By modulating the phase hologram loaded to the SLM, the intensity distribution of femtosecond laser beam is controlled. Microtubes, with well controlled diameter, length and distribution are efficiently fabricated. Complicated microtube arrays, including 2×1, 2×2 arrays, 5 tubes microrocket and 9 tubes microrocket are fabricated rapidly within several seconds. Individual microtube in these arrays keeps its original shape without any deformation and interaction with each other. A sputtered 80 nm Ni layer imposes the microtubes with paramagnetic property. Rapid steering of the nickel coated microtubes along specific route in fluid environment with external magnetic field produced by columnar magnet has been realized. Controlled driving of microtubes along a “NANO” type trajectory has been achieved. The magnetic driving of microtubes will not be affected by environmental variation, electric signal, temperature signal and optical signal. This method is flexible, controllable as well as efficient, and the fabricated drivable microtubes have promising applications in noninvasive surgery, targeted drug delivery, bioimaging or biosensing and microenvironment cleaning
-
Access History

Export File
Citation
Chen Xin, Liang Yang, Zhijiang Hu, et al. Microtube fabrication based on femtosecond Bessel beam and its flexible driving with external magnetic field[J]. Opto-Electronic Engineering, 2017, 44(12): 1180-1186. doi: 10.3969/j.issn.1003-501X.2017.12.005
Format
Content
 DownLoad:
DownLoad:
-
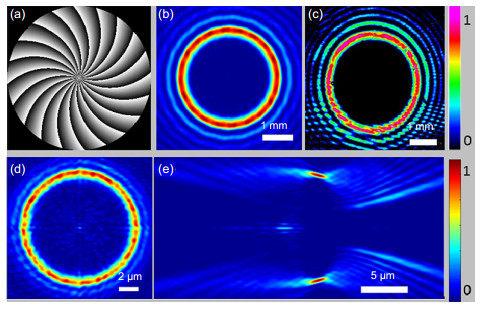
Figure 1.
The phase diagram and intensity distribution of Bessel beams. (a) n=20, r0=480 Bessel beam hologram. (b) Intensity distribution simulation of femtosecond Bessel beam. (c) Measurement of light intensity distribution of Bessel beam. (d) Microscopic distribution of light intensity of femtosecond Bessel beam. (e) The intensity distribution of the Bessel beam along the propagation direction.
-
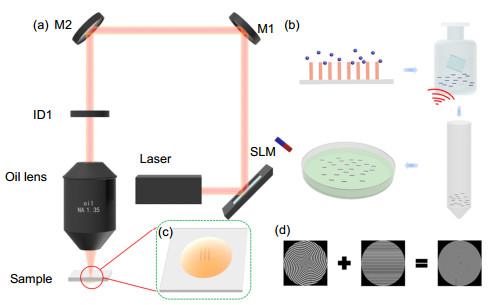
Figure 2.
Schematic diagram of femtosecond Bessel beam processing system and flow chart of microtubes fabrication procedure. (a) Schematic diagram of femtosecond Bessel beam fabrication system. (b) Flow chart of microtubes post-treatment process. (c) Enlarged image of microtubes. (d) Hologram loaded on SLM: Bessel hologram and Blazed grating.
-
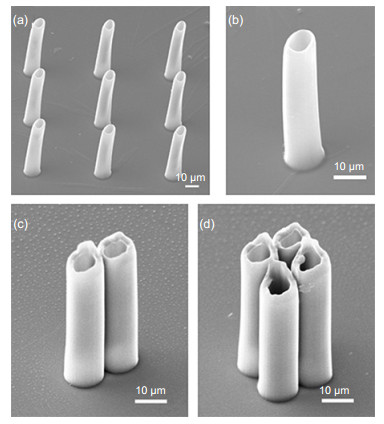
Figure 3.
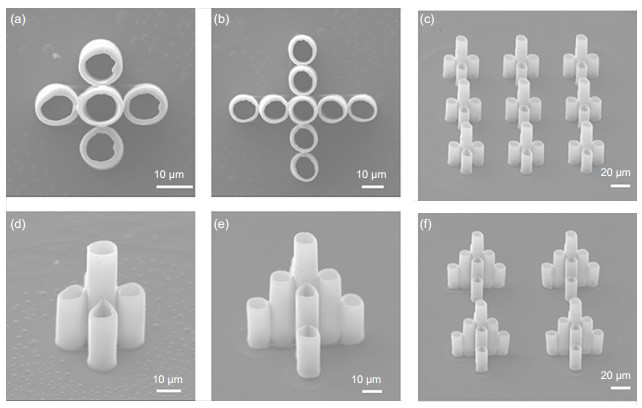
SEM images of Bessel light holographic processing structure. (a) SEM image of Bessel microtube arrays. (b) Enlarged image of single Bessel microtube. (c), (d) SEM image of 2×1 and 2×2 type, microtubes with 50 μm height, respectively.
-
Figure 4.
SEM images of complex structure fabricated by femtosecond Bessel beam. (a), (b) Top view of 5 tubes microrocket, 9 tubes microrocket and (d), (e) 45° captured images of 5 tubes microrocket, 9 tubes microrocket. (c), (f) Microrockets arrays.
-
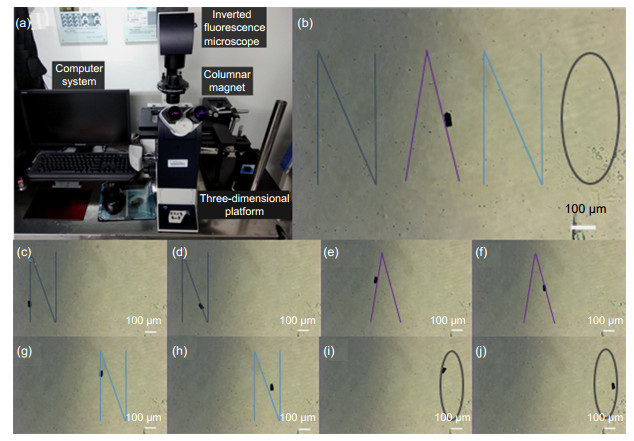
Figure 5.
Magnetic drive system diagram and the trajectory of microtube under external magnetic field. (a) Magnetic drive system diagram. (b) Microtube complete "NANO" type trajectory. (c)~(j) The location of microtube at different time.


