
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
为了实现对微小位移的高精度非接触测量,设计了一种基于线阵CCD的高精度位移传感器前端模块。运用激光三角测量法设计了光学镜头,利用FPGA产生线阵CCD所需的驱动时序,CCD输出的一维视频信号经过前置电路处理后得到稳定的模拟信号,供数字电路进行处理。系统具有结构简单、体积小、输出信号稳定、分辨率高、测量精度高等特点。实验测试表明,该传感器前端模块输出模拟信号稳定,干扰小,计算得到最大量程为±15 mm,精度可达到20 μm,能广泛应用于微小位移的精密测量。
 Abstract:
Abstract:In order to achieve the high-precision non-contact measurement for tiny displacement, a high-precision displacement sensor front-end module is designed based on linear array CCD. An optical lens is designed using the principle of laser triangulation, and the system uses the FPGA to generate the drive timing required for the linear array CCD. The one-dimensional video signal output by CCD is handled to obtain a stable analog signal through the front circuit, and the signal is available for digital circuitry. The system has the characteristics of simple structure, small volume, stable output signal, high resolution and high precision. Experimental tests show that the sensor front-end module outputs are stable with small interference analog signal after calculation, the maximum range is ±15 mm, and the accuracy can reach 20 μm. The system can be widely used in the precise measurement of tiny displacement.
-
Key words:
- displacement sensor /
- linear array CCD /
- laser triangulation /
- drive timing /
- signal processing
-

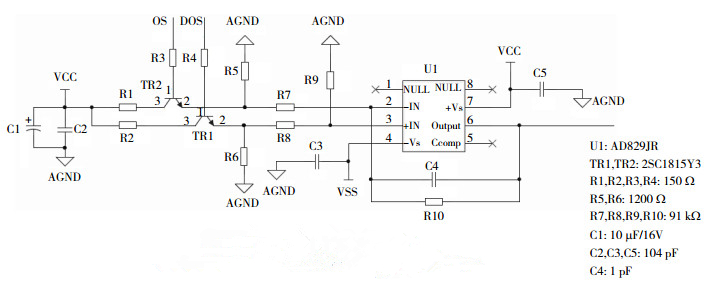
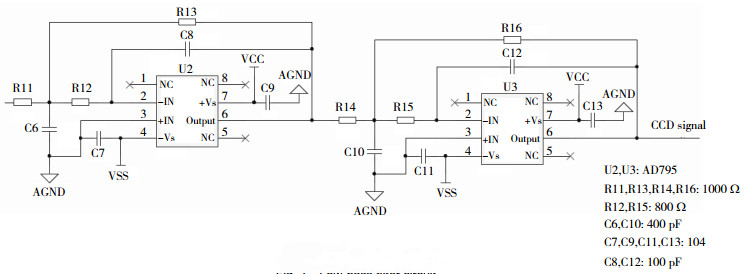
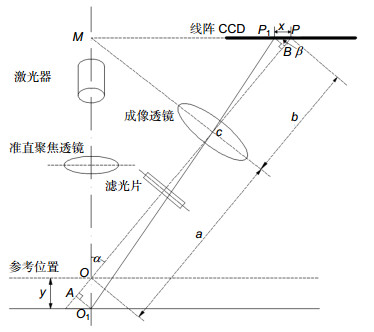
Abstract: The laser displacement measurement system has great demand in the field of measurement in China, but the domestic measurement of displacement equipment are different from foreign products in the miniaturization and performance, existing large volume, low accuracy, limit of application environment and other issues. Moreover, the research on displacement measurement system based on CCD still remains in the laboratory stage and cannot be manufactured. In order to achieve the high-precision non-contact measurement for tiny displacement, a high-precision displacement sensor front-end module is designed based on linear array CCD. The laser is used as a displacement signal transmission medium. The principles of laser triangulation and 〝Scheimpflug〞 theorem are used to design an optical lens. The light spot reflected by the measured surface is focused on the photoelectric sensor. According to the structure of linear array CCD and drive timing analyses, the system uses the FPGA to generate the drive pulse timing required for the linear array CCD, and the inverter to improve the driving ability to drive linear array CCD normally. The CCD pixel outputs the one-dimensional video signal and compensation signal after the spot is illuminated. Differential amplifier circuit and low-pass filter circuit are applied to eliminate the reset pulse crosstalk and high frequency noise interference, and a stable analog signal is output, which is available for digital circuits for high frequency sampling to obtain digital signals. Thereby the size and position of the spot center are obtained through the image processing algorithm. When the measured surface moves, the position of the spot center on the CCD also moves. According to the laser triangulation principle, we can calculate the displacement of the measured surface in the direction of the optical axis. The system has the characteristics of simple structure and small volume. The design of integrated circuit meets the measurement requirements, such as stable output signal, high resolution and high precision. Moreover, the designed optical structure meets the requirements, and linear array CCD driving circuit is simple and applicable, aiming at the front-end acquisition and amplification. Experimental tests show that the sensor front-end module outputs are stable with small interference analog signal after calculation. The maximum range is ±15 mm, and the accuracy can reach 20 μm after image processing. The system can be widely used in the precise measurement of tiny displacement, and has a strong practicality and guidance for engineering design. In the future, the system should be further designed and improved in terms of analog signal acquisition, A/D conversion, digital signal processing and image processing. So that it can make a complete and accurate measurement of the displacement and be suitable for practical applications and the need for production.
-

-
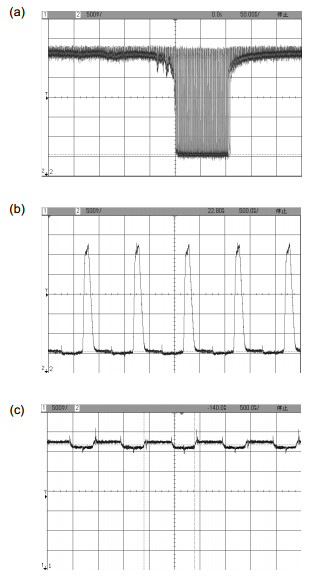
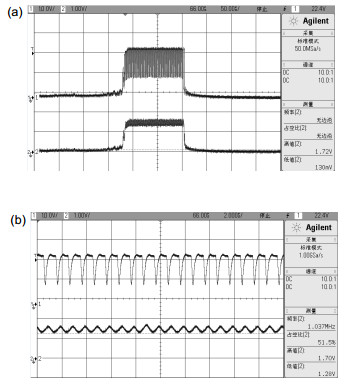
图 8 OS和DOS输出信号波形. (a)一个扫描周期OS端输出波形. (b)光斑照射像元处信号波形. (c) DOS端补偿信号输出波形.
Figure 8. Output signal waveform of OS and DOS. (a) The OS output waveform of one scan cycle. (b) The signal waveform of pixels which spot illumination. (c) Compensation signal output waveform of DOS.
-
[1] 方平, 丁凡, 李其朋.基于线阵CCD的新型微位移传感器的研究[J].传感技术学报, 2006, 19(1): 74–77. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=cgjs200601017&dbname=CJFD&dbcode=CJFQ
Fang Ping, Ding Fan, Li Qipeng. Research on a novel mi-cro-displacement sensor based on linear CCD[J]. Chinese Journal of Sensors and Actuators, 2006, 19(1): 74–77. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=cgjs200601017&dbname=CJFD&dbcode=CJFQ
[2] 赵友全, 江磊, 何峰, 等.线阵CCD光电响应非线性特性测定与分析[J].光电工程, 2015, 42(7): 19–23. http://www.cnki.com.cn/Article/CJFDTotal-GDGC201507005.htm
Zhao Youquan, Jiang Lei, He Feng, et al. Measurement and analysis of linear CCD nonlinear optical response characteristics[J]. Opto-Electronic Engineering, 2015, 42(7): 19–23. http://www.cnki.com.cn/Article/CJFDTotal-GDGC201507005.htm
[3] Ma Dengji, Zhu Shanan, Wang Changjun. Application of linear CCD in high precision diameter measuring system[J]. Computer Measurement & Control, 2006, 14(2): 175–176. http://en.cnki.com.cn/Article_en/CJFDTotal-JZCK200602013.htm
[4] 黄彤津, 朱礼尧, 迟涵文, 等.基于CPLD的线阵CCD驱动电路的设计[J].电子测量技术, 2014, 37(7): 66–70. http://www.cnki.com.cn/Article/CJFDTOTAL-GSKJ200507023.htm
Huang Tongjin, Zhu Yaoli, Chi Hanwen, et al. Design of a linear array CCD drive circle based on CPLD[J]. Electronic Measurement Technology, 2014, 37(7): 66–70. http://www.cnki.com.cn/Article/CJFDTOTAL-GSKJ200507023.htm
[5] 迟涵文, 朱礼尧, 吴涛, 等.基于单片机的线阵CCD驱动模块硬件设计与实现[J].国外电子测量技术, 2015, 34(11): 76–79. doi: 10.3969/j.issn.1002-8978.2015.11.016
Chi Hanwen, Zhu Liyao, Wu Tao, et al. Design and implementation of linear CCD driver module hardware based on MCU[J]. Foreign Electronic Measurement Technology, 2015, 34(11): 76–79. doi: 10.3969/j.issn.1002-8978.2015.11.016
[6] 褚世冲, 徐耀良, 周奇聪, 等.三色线阵CCD高速信号处理系统的优化设计[J].电子测量技术, 2015, 38(9): 107–111. http://www.cqvip.com/QK/92082X/201509/666260509.html
Chu Shichong, Xu Yaoliang, Zhou Qicong, et al. Optimization design of tricolour linear CCD high speed signal processing system[J]. Electronic Measurement Technology, 2015, 38(9): 107–111. http://www.cqvip.com/QK/92082X/201509/666260509.html
[7] 闫加俊, 安志勇, 高瑀含.小型激光三角探头光学系统设计[J].长春理工大学学报(自然科学版), 2012, 35(4): 38–41,52. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ccgxjmjxxyxb201204011
Yan Jiajun, An Zhiyong, Gao Yuhan. The optical system design of a miniaturization laser triangulation probe[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2012, 35(4): 38–41, 52. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ccgxjmjxxyxb201204011
[8] Smith K B, Zheng Y F. Accuracy Analysis of Point Laser Trian-gulation Probes Using Simulation[J]. Journal of Manufacturing Science and Engineering, 1998, 120: 736–745. doi: 10.1115/1.2830214
[9] 陈家兴, 陶卫, 杨红伟, 等.激光三角位移传感器定位算法优化设计[J].传感器与微系统, 2016, 35(9): 62–65. http://www.cqvip.com/QK/90353X/201609/670013386.html
Chen Jiaxing, Tao Wei, Yang Hongwei, et al. Optimized design of locating algorithm for laser triangulation displacement sensor[J]. Transducer and Microsystem Technologies, 2016, 35(9): 62–65. http://www.cqvip.com/QK/90353X/201609/670013386.html
[10] 王晓嘉, 高隽, 王磊.激光三角法综述[J].仪器仪表学报, 2004, 25(S4): 601–604,608. https://www.wenkuxiazai.com/doc/89073a892cc58bd63186bdbf-3.html
Wang Xiaojia, Gao Juan, Wang Lei. Survey on the laser triangulation[J]. Chinese Journal of Scientific Instrument, 2004, 25(S4): 601–604,608. https://www.wenkuxiazai.com/doc/89073a892cc58bd63186bdbf-3.html
[11] TOSHIBA CCD LINEAR IMAGE CCD(Charge Coupled Device) TCD1252AP[K]. 1997.
[12] 黄文林, 扬光永, 胡国清.基于CPLD和Verilog的高精度线阵CCD驱动电路设计[J].科学技术与工程, 2012, 12(30): 8052–8057. doi: 10.3969/j.issn.1671-1815.2012.30.055
Huang Wenlin, Yang Guangyong, Hu Guoqing. The design of a high accuracy linear array CCD driving circuit based on CPLD and verilog[J]. Science Technology and Engineering, 2012, 12(30): 8052–8057. doi: 10.3969/j.issn.1671-1815.2012.30.055
[13] 章琦, 陈慧明, 毛玉兵, 等.线阵CCD驱动时序及信号采集系统的设计[J].仪表技术与传感器, 2010(2): 75–77. http://www.doc88.com/p-84654382904.html
Zhang Qi, Chen Huiming, Mao Yubing, et al. Design of linear CCD driving generator and signal acquisition system[J]. Instrument Technique and Sensor, 2010(2): 75–77. http://www.doc88.com/p-84654382904.html
[14] 赵山山, 张红民, 贾海彦.基于线阵CCD的模拟前端设计[J].仪表技术与传感器, 2016(4): 25–26, 31. http://www.cqvip.com/QK/94978X/201604/669034133.html
Zhao Shanshan, Zhang Hongmin, Jia Haiyan. Analog front end design based on linear CCD[J]. Instrument Technique and Sensor, 2016(4): 25–26, 31. http://www.cqvip.com/QK/94978X/201604/669034133.html
[15] 李杰强. 基于线阵 CCD 的微位移传感器设计与研究[D]. 广州: 华南理工大学, 2012.
Li Jieqiang. The design and research of micro displacement sensor base on linear CCD[D]. Guangzhou: South China Uni-versity of Technology, 2012.
-
 下载:
下载:

 点击扫一扫
点击扫一扫
图(9)
计量
- 文章访问数: 7992
- PDF下载数: 3995
- 施引文献: 0


