
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
在基于图像传感器的倾斜镜控制系统中,由于传感器采样频率和系统延时的影响,限制了系统的闭环性能和控制带宽。在有限带宽的条件下,本文提出利用光栅尺测量位置,差分得到速度,实现基于图像传感器系统的速度-位置反馈控制,从而提升倾斜镜控制系统的误差抑制能力。速度反馈环节的引入,使控制系统呈微分特性,当速度反馈闭环完成后,图像位置回路具有积分特性,此时使用PI控制器稳定系统,从而使得系统从零型上升为二型系统,提升系统的误差抑制能力。仿真和实验都证明这种方法可以有效地提高跟踪控制系统的闭环性能。
 Abstract:
Abstract:In the image-based tip-tilt mirror control system, the closed-loop performance and bandwidth of the system and are limited due to the influence of sensor sampling frequency and system delay. Under the condition of limited bandwidth, this paper proposes to use linear encoder to measure the position, and get the rate signal by difference. The position-rate feedback control based on the image sensor system is realized to improve the error suppression ability of the tip-tilt mirror control system. Because of the addition of rate feedback, the control system has differential characteristics. When the rate feedback closed-loop is completed, the image position loop has integral characteristic. At this time, a PI controller is used to stabilize the system, which makes the system rise from zero type to two type system, and improves the error suppression ability of the system. Simulation and experiment show that this method can effectively improve the closed-loop performance of the tracking control system in low frequency domain.
-
Key words:
- tip-tilt mirror /
- linear encoder /
- image sensor /
- time delay /
- position-rate control /
- error attenuation
-

Overview: The tip-tilt mirror control system is widely used in photoelectric tracking system, and has a wide range of applications in target tracking, target observation, space communication, and other fields. The image sensor detects the target and provides the position deviation for the control system, which is the input signal of the tilt mirror, thus a position closed-loop system can be formed. The performance of the tip-tilt mirror control system is the key to realize high precision tracking of the photoelectric tracking system. The most effective way is to increase the gain of control system for a high bandwidth. However, in the image-based tip-tilt mirror control system, it is difficult to improve the bandwidth due to the large amount of time delay and the limitation of image sensor sampling frequency. Therefore, many studies show that researchers have proposed various methods to enhance the tracking performance of tilt mirror system from the aspects of hardware and software. In terms of hardware, some studies were proposed to reduce the time delay and improve the sampling frequency of image sensor, but blindly reducing the time delay would affect the image of image sensor. On the other hand, some scholars proposed to use gyroscopes or other inertial sensors to make the control system form a multi closed-loop control mode, but because of the installation mode of these inertial for contact mounting, the load of the tilt mirror will increase, which will affect the system response. The linear encoder is a kind of non-contact sensor. Its installation will not increase the driving load. Because of its high resolution and accuracy, the rate signal can be calculated from the measured position signal. Therefore, a position-rate control method of the tip-tilt mirror based on grating measurement is proposed in this paper. The open-loop rate transfer function of the tip-tilt mirror features differential in the low frequency domain because the original tip-tilt control system is zero-type. When the inner rate feedback loop is implemented, an integrator is introduced into the original position loop. A PI (proportional-integral) controller can stabilize the position loop, leading to two integrators to be in the tracking loop, so the low-frequency performance can be improved compared with the original control method. The experimental results coincide with the theoretical analysis, verifying the correctness of the presented theories.
-

-

图 1 基于图像的倾斜后视镜跟踪控制系统的配置
Figure 1. Configuration of an image-based tracking control system for tip-tilt mirror
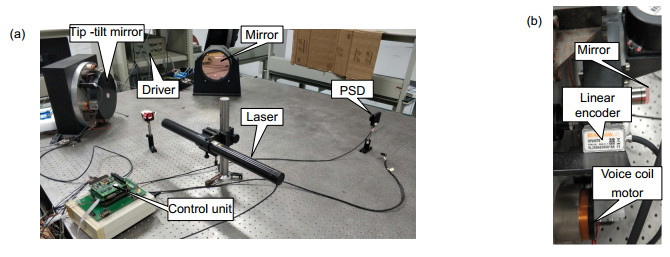
图 4 实验平台的组成。(a)整体分布图;(b)倾斜镜局部
Figure 4. Configuration of experimental platform. (a) Global diagram; (b) Local diagram of tip-tilt mirror
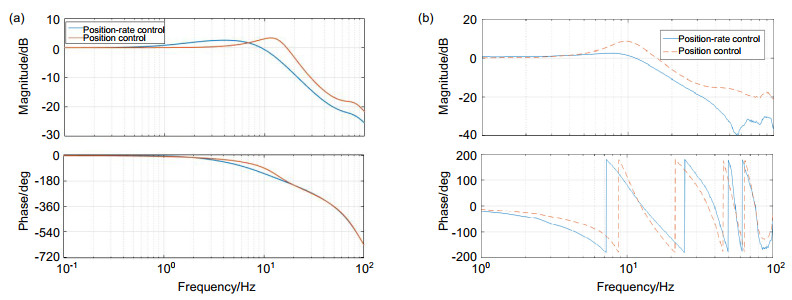
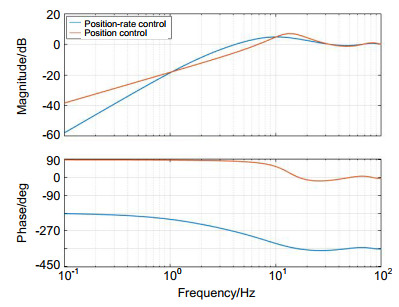
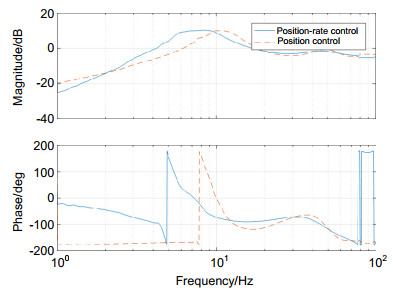
图 5 倾斜镜系统的跟踪控制闭环响应。(a)仿真;(b)实验
Figure 5. Tracking control closed-loop responses of the tip-tilt mirror system. (a) Simulation; (b) Experiment
-
[1] Cochran R W, Vassar R H. Fast-steering mirrors in optical control systems[J]. Proceedings of SPIE, 1990, 1303: 245-251. doi: 10.1117/12.21507
[2] 黄林海, 凡木文, 周睿, 等.大口径压电倾斜镜模型辨识与控制[J].光电工程, 2018, 45(3): 170704. doi: 10.12086/oee.2018.170704
Huang L H, Fan M W, Zhou R, et al. System identification and control for large aperture fast-steering mirror driven by PZT[J]. Opto-Electronic Engineering, 2018, 45(3): 170704. doi: 10.12086/oee.2018.170704
[3] 姜文汉.自适应光学发展综述[J].光电工程, 2018, 45(3): 170489. doi: 10.12086/oee.2018.170489
Jiang W H. Overview of adaptive optics development[J]. Opto-Electronic Engineering, 2018, 45(3): 170489. doi: 10.12086/oee.2018.170489
[4] Gaffard J P, Boyer C. Adaptive optics: effect of sampling rate and time lags on the closed-loop bandwidth[J]. Proceedings of SPIE, 1990, 1237: 376-393. doi: 10.1117/12.19311
[5] Dessenne C, Madec P Y, Rabaud D, et al. First sky tests of adaptive optics predictive control[J]. Optoelectronics Letters, 2008, 4: 407-409. doi: 10.1007/s11801-008-7142-4
[6] Southwood D M. CCD-based optical tracking loop design trades[J]. Proceedings of SPIE, 1992, 1635: 286-299. doi: 10.1117/12.59274
[7] Busch T E, Skormin V A. Experimental implementation of model-reference-control for fine-tracking mirrors[J]. Proceedings of SPIE, 1997, 2990: 183-189. doi: 10.1117/12.273695
[8] Ren W, Luo Y, He Q N, et al. Stabilization control of electro-optical tracking system with fiber-optic gyroscope based on modified smith predictor control scheme[J]. IEEE Sensors Journal, 2018, 18(19): 8172-8178. doi: 10.1109/JSEN.2018.2835147
[9] 田竞, 邓超, 曹政, 等.加速度反馈技术在惯性稳定平台中的应用[J].光电工程, 2016, 43(12): 40-45. doi: 10.3969/j.issn.1003-501X.2016.12.007
Tian J, Deng C, Cao Z, et al. Application of acceleration feedback techniques on inertial stabilization platform[J]. Opto-Electronic Engineering, 2016, 43(12): 40-45. doi: 10.3969/j.issn.1003-501X.2016.12.007
[10] Mao Y, Ren W, Luo Y, et al. Optimal design based on closed-loop fusion for velocity bandwidth expansion of optical target tracking system[J]. Sensors, 2019, 19(1): 133. doi: 10.3390/s19010133
[11] RESOLUTE™ absolute optical encoder with BiSS serial communications[EB/OL]. London: England. (2019-12-06)[2019-12-06]. https://www.renishaw.com/en/resolute-downloads--37856.
[12] 邓军. STM32编码器在光栅尺测速场合的实际应用[J].信息技术, 2013(8): 53. https://www.cnki.com.cn/Article/CJFDTOTAL-CXYY201308050.htm
Deng J. The practical application of STM32 encoder in grating speed measurement[J]. Information Technology, 2013(8): 53. https://www.cnki.com.cn/Article/CJFDTOTAL-CXYY201308050.htm
[13] 刘红丽, 崔建明, 曹春岩.光栅尺在永磁直线同步电动机测速测位移中的应用[J].电气技术, 2009(12): 26-28, 40. doi: 10.3969/j.issn.1673-3800.2009.12.009
Liu H L, Cui J M, Cao C Y. Application of raster ruler to detecting speed and position in the permanent magnet linear synchronous motor[J]. Electrical Engineering, 2009(12): 26-28, 40. doi: 10.3969/j.issn.1673-3800.2009.12.009
-
 下载:
下载:

 点击扫一扫
点击扫一扫
图(8)
计量
- 文章访问数: 4504
- PDF下载数: 653
- 施引文献: 0


