
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
针对空间激光通信系统小型化设计的需求,提出了使用四象限探测器实现捕获与跟踪的方案。通过分析四象限探测器上光斑的位置分布,推导了三种光斑分布的4QD捕获牵引模型,通过对4QD光斑位置的解算以及与跟踪机构的精准标定,实现了4QD的高精度跟踪。在实验室基于一台激光终端与系统测试平台,对四象限探测器的捕获与跟踪方案及性能进行了实验验证,测试结果表明,在实验室动态条件下,用4QD作为捕获及跟踪探测器,捕获概率高达100%,跟踪精度优于3 μrad,验证了该方案的可行性,为激光终端小型化设计奠定了基础。
 Abstract:
Abstract:Aiming at the space laser communication system requirement of miniaturization, this paper proposes a scheme of using the four-quadrant detector to complete the acquisition and tracking. By analyzing the position distribution of the spots on the four-quadrant detector (4QD), the acquisition models are derived for the three kinds of spots distribution. Through the calculation of the position of the spots and the accurate calibration of the tracking mechanism, the high precision tracking is realized. Then besed on the laserteco and system test platform the capture and tracking scheme and detection performance of the 4QD are experimentally verified. The test results show that under the laboratory dynamic conditions, using 4QD as the capture and tracking detector, the capture probability is up to 100%, and tracking accuracy is better than 3μrad, which verifies the feasibility of the scheme and lays a foundation for the miniaturization design of the laser terminal.
-

Overview: Before establishing the communication link, acquisition, pointing and tracking (APT) is needed to complete in the space laser communication system. Charge coupled device (CCD) or four-quadrant detector (4QD) are usually selected as capture and tracking detectors to determine the spot center, and miss distance is sent to the servo system to complete the capture and tracking tasks. At present, most laser communication systems choose 800 nm and 1550 nm. Compared with the 800 nm, 1550 nm laser has the advantages of having little impact on human safety and atmospheric environment. However, CCD detector has low response sensitivity and cannot meet the requirements for the 1550 nm, so 4QD is the ideal choice. In recent years, there have been many researches on 4QD in the field of laser communication. For 4QD applications mostly limited to the desktop system, not to dynamic test, 4QD is applied to capture and tracking studies did not report. Using 4QD as capture and tracking detector, laser communication system does not need to be high power beacon laser, the beacon transmitting branch and beacon capture detector. It can reduce the complexity of the system, power and volume.
Aiming at the space laser communication system requirement of miniaturization, this paper proposes a scheme of using the four-quadrant detector to complete the acquisition and tracking. By analyzing the position distribution of the spots on the 4QD, the acquisition models are derived for the three kinds of spots distribution. Through the calculation of the position of the spots and the accurate calibration of the tracking mechanism, the high precision tracking is realized. Then besed on the laserteco and system test platform the capture and tracking scheme and detection performance of the 4QD are experimentally verified. The laser terminal used in the experiment is a laser terminal with a tracking detector of 4QD, which can receive 1550 nm and 1 M intensity modulation signal light. The detector's field of view is 2 mrad, the coarse pointing mechanism is a latent looking structure, and the pointing accuracy is better than 30 μrad. The fine tracking mechanism is a two-dimensional deflection mechanism of piezoelectric ceramics. Its deflection range is 4mrad and positioning accuracy is better than 3 μrad. The test results show that under the laboratory dynamic conditions, using 4QD as the capture and tracking detector, the capture probability is up to 100%, and tracking accuracy is better than 3 μrad, which verifies the feasibility of the scheme and lays a foundation for the miniaturization design of the laser terminal.
-

-
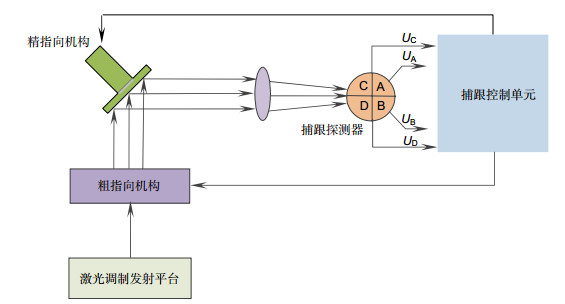
图 1 4QD捕获与跟踪复用系统组成
Figure 1. System composition of acquisition and tracking multiplexing
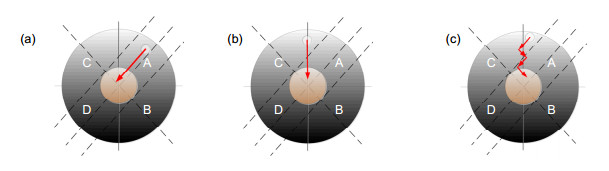
图 3 光斑在4QD上的收敛方式
Figure 3. Convergence mode of light spots on the four-quadrant detector
-
[1] 王选钢, 王仕明, 陈丹丹, 等.采用四象限探测器的激光跟踪系统设计[J].激光与红外, 2017, 47(4): 432–436. doi: 10.3969/j.issn.1001-5078.2017.04.008
Wang X G, Wang S M, Chen D D, et al. Design of laser tracking system with quadrant detector[J]. Laser & Infrared, 2017, 47(4): 432–436. doi: 10.3969/j.issn.1001-5078.2017.04.008
[2] Deng K, Wang B Z, Zhao G H, et al. Principle and performance analysis of coherent tracking sensor based on local oscillator beam nutation[J]. Optics Express, 2014, 22(19): 23528–23538. doi: 10.1364/OE.22.023528
[3] 张艺蓝, 姜会林, 张磊, 等.基于四象限探测器的跟踪与通信技术研究[J].光通信技术, 2017, 41(10): 27–29. http://d.old.wanfangdata.com.cn/Periodical/gtxjs201710008
Zhang Y L, Jiang H L, Zhang L, et al. Research on tracking and communication technology base on the four-quadrant detector[J]. Optical Communication Technology, 2017, 41(10): 27–29. http://d.old.wanfangdata.com.cn/Periodical/gtxjs201710008
[4] 韩成, 白宝兴, 杨华民, 等.自由空间激光通信四象限探测器性能研究[J].中国激光, 2009, 36(8): 2030–2034. http://d.old.wanfangdata.com.cn/Periodical/zgjg200908024
Han C, Bai B X, Yang H M, et al. Study four-quadrant detector in the free space laser communication[J]. Chinese Journal of Lasers, 2009, 36(8): 2030–2034. http://d.old.wanfangdata.com.cn/Periodical/zgjg200908024
[5] 宋哲宇, 付芸, 范新坤, 等.四象限探测器定位精度的分析与仿真[J].长春理工大学学报(自然科学版), 2018, 41(2): 41–44. doi: 10.3969/j.issn.1672-9870.2018.02.010
Song Z Y, Fu Y, Fan X K, et al. Analysis and simulation of positioning accuracy of four-quadrant detector[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2018, 41(2): 41–44. doi: 10.3969/j.issn.1672-9870.2018.02.010
[6] 林鑫, 郭迎, 韩明珠, 等.基于四象限探测器的激光束二维扫描跟踪系统的研究[J].半导体光电, 2018, 39(3): 425–430. http://d.old.wanfangdata.com.cn/Periodical/bdtgd201803026
Lin X, Guo Y, Han M Z, et al. Research on two-dimensional laser beam scanning and tracking system based on four quadrant detector[J]. Semiconductor Optoelectronics, 2018, 39(3): 425–430. http://d.old.wanfangdata.com.cn/Periodical/bdtgd201803026
[7] 范新坤, 张磊, 宋延嵩, 等.四象限探测器的跟踪与通信复合探测技术[J].中国激光, 2017, 44(9): 0906009. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201709031
Fan X K, Zhang L, Song Y S, et al. Simultaneous detection technology of tracking and communication based on four-quadrant detector[J]. Chinese Journal of Lasers, 2017, 44(9): 0906009. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201709031
[8] 谷野.基于四象限探测器的跟踪与通信复用技术研究[D]长春: 长春理工大学, 2016: 1–7.
Gu Y. Research on the multiplexing technology of tracking and communication based on the four quadrant detector[D]. Changchun: Changchun University of Science and Technology, 2016: 1–7.
http://cdmd.cnki.com.cn/Article/CDMD-10186-1016786385.htm [9] 赵馨, 宋延嵩, 佟首峰, 等.空间激光通信捕获、对准、跟踪系统动态演示实验[J].中国激光, 2014, 41(3): 0305005. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201403022
Zhao X, Song Y S, Tong S F, et al. Dynamic demonstration experiment of acquisition, pointing and tracking system in space laser communication[J]. Chinese Journal of Lasers, 2014, 2014, 41(3): 0305005. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201403022
[10] 郭小康, 张彦梅, 贺仕杰.基于四象限探测器的光斑中心高精度定位算法[J].激光与红外, 2017, 47(11): 1353–1357. doi: 10.3969/j.issn.1001-5078.2017.11.006
Guo X K, Zhang Y M, He S J. Study on high precision positioning algorithm of spot center based on the four-quadrant detector[J]. Laser & Infrared, 2017, 47(11): 1353–1357. doi: 10.3969/j.issn.1001-5078.2017.11.006
-
 下载:
下载:



 点击扫一扫
点击扫一扫
图(5)
计量
- 文章访问数: 9416
- PDF下载数: 2929
- 施引文献: 0


