
 E-mail Alert
E-mail Alert RSS
RSS
| Citation: |
Tong Wei, Lei Yuan. Highly real-time blind sidewalk recognition algorithm based on boundary tracking[J]. Opto-Electronic Engineering, 2017, 44(7): 676-684. doi: 10.3969/j.issn.1003-501X.2017.07.003

|
Highly real-time blind sidewalk recognition algorithm based on boundary tracking
-
Abstract
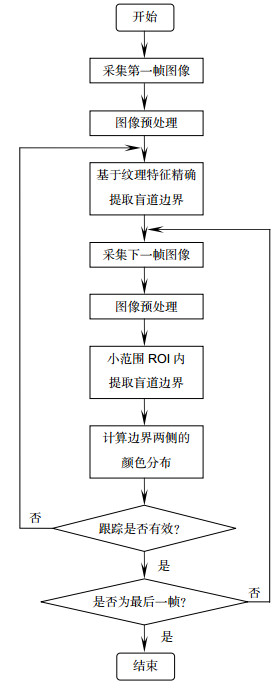
In order to solve the problem that existing blind sidewalk recognition algorithms have bad real-time performance, a highly real-time blind sidewalk recognition algorithm based on boundary tracking is proposed, mainly including accurate recognition and tracking recognition. First, accurate recognition step mainly calculates gray level co-occurrence matrix of the initial frame, and uses clustering and Hough transform to find the boundary lines of blind sidewalk in image. Then tracking recognition step takes over next frame. The location of blind sidewalk's boundary in previous frame is used to predict the small-scale region of interest (ROI) of the boundary in current frame, and boundary lines in that region are extracted based on gray gradient feature. After that, the algorithm checks up the validity of tracking by estimating the consistency of color distribution on both sides of the boundary in previous and current frames: tracking is considered to be valid if the consistency is high, and tracking recognition step continues, otherwise accurate recognition step restarts. In many experiments, the time of accurate recognition and tracking recognition in each image frame under normal illumination are about 0.8 s and 0.1 s, respectively, and the average time of recognition per frame decreases significantly while the recognition rate of blind sidewalk is more than 90%. Meanwhile, the adaptability is good in shadow environment. Experimental results indicate that the algorithm can significantly enhance the real-time performance of blind sidewalk recognition in the premise of ensuring the recognition rate. -

-
References
[1] Pradeep V, Medioni G, Weiland J. A wearable system for the visually impaired[C]. Proceedings of 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2010: 6233–6236. [2] Pradeep V, Medioni G, Weiland J. Robot vision for the visually impaired[C]. Proceedings of 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, 2010: 15–22. [3] Kammoun S, Parseihian G, Gutierrez O, et al. Navigation and space perception assistance for the visually impaired: The NAVIG project[J]. IRBM, 2012, 33(2): 182–189. doi: 10.1016/j.irbm.2012.01.009 [4] Leung T S, Medioni G. Visual navigation aid for the blind in dynamic environments[C]. Proceedings of 2014 IEEE Conference on Computer Vision and Pattern Recognition Workshops, 2014: 579–586. https://www.cv-foundation.org/openaccess/content_cvpr_workshops_2014/W16/papers/Leung_Visual_Navigation_Aid_2014_CVPR_paper.pdf [5] 柯剑光. 基于图像处理的盲道识别系统[D]. 上海: 上海交通大学, 2008. Ke Jianguang. The recognition system for the blind way based on image processing[D]. Shanghai: Shanghai Jiao Tong University, 2008. http://cdmd.cnki.com.cn/Article/CDMD-10248-2008053311.htm [6] 彭玉青, 薛杰, 郭永芳.基于颜色纹理信息的盲道识别算法[J].计算机应用, 2014, 34(12): 3585–3588, 3604. Peng Yuqing, Xue Jie, Guo Yongfang. Blind road recognition algorithm based on color and texture information[J]. Journal of Computer Applications, 2014, 34(12): 3585–3588, 3604. [7] 周毅, 赵群飞.基于颜色信息的盲道区域检测与跟随算法[J].微型电脑应用, 2010, 26(8): 47–50. Zhou Yi, Zhao Qunfei. Detecting and tracing algorithm of blind sidewalk based on color information[J]. Microcomputer Appli-cations, 2010, 26(8): 47–50. [8] 柯剑光, 赵群飞, 施鹏飞.基于图像处理的盲道识别算法[J].计算机工程, 2009, 35(1): 189–191, 197. Ke Jianguang, Zhao Qunfei, Shi Pengfei. Blind way recognition algorithm based on image processing[J]. Computer Engineering, 2009, 35(1): 189–191, 197. [9] Jung C, Kim W, Kim C. Detecting shadows from a single image[J]. Optics Letters, 2011, 36(22): 4428–4430. doi: 10.1364/OL.36.004428 [10] 杨俊, 赵忠明.基于归一化RGB色彩模型的阴影处理方法[J].光电工程, 2007, 34(12): 92–96. doi: 10.3969/j.issn.1003-501X.2007.12.019 Yang Jun, Zhao Zhongming. Shadow processing method based on normalized RGB color model[J]. Opto-Electronic Engineering, 2007, 34(12): 92–96. doi: 10.3969/j.issn.1003-501X.2007.12.019 [11] Rampun A, Strange H, Zwiggelaar R. Texture segmentation using different orientations of GLCM features[C]. Proceedings of the 6th International Conference on Computer Vi-sion/Computer Graphics Collaboration Techniques and Applications, 2013: 17. https://www.researchgate.net/publication/237089640_Texture_Segmentation_Using_Different_Orientations_of_GLCM_Features [12] 桑庆兵, 李朝锋, 吴小俊.基于灰度共生矩阵的无参考模糊图像质量评价方法[J].模式识别与人工智能, 2013, 26(5): 492–497. Sang Qinbing, Li Chaofeng, Wu Xiaojun. No-reference blurred image quality assessment based on gray level co-occurrence matrix[J]. Pattern Recognition and Artificial Intelligence, 2013, 26(5): 492–497. [13] Guerreiro R F C, Aguiar P M Q. Connectivity-enforcing Hough transform for the robust extraction of line segments[J]. IEEE Transactions on Image Processing, 2012, 21(12): 4819–4829. doi: 10.1109/TIP.2012.2202673 [14] 钟权, 周进, 吴钦章, 等.基于Hough变换和边缘灰度直方图的直线跟踪算法[J].光电工程, 2014, 41(3): 89–94. Zhong Quan, Zhou Jin, Wu Qinzhang, et al. A method of line tracking based on Hough transforms and edge histogram[J]. Opto-Electronic Engineering, 2014, 41(3): 89–94. [15] Kim J, Lee S. Extracting major lines by recruiting ze-ro-threshold canny edge links along sobel highlights[J]. IEEE Signal Processing Letters, 2015, 22(10): 1689–1692. doi: 10.1109/LSP.2015.2400211 [16] 袁小翠, 吴禄慎, 陈华伟.基于Otsu方法的钢轨图像分割[J].光学精密工程, 2016, 24(7): 1772–1781. Yuan Xiaocui, Wu Lushen, Chen Huawei. Rail image segmentation based on Otsu threshold method[J]. Optics and Precision Engineering, 2016, 24(7): 1772–1781. [17] Aznaveh M M, Mirzaei H, Roshan E, et al. A new and improves skin detection method using RGB vector space[C]. Proceed-ings of the 5th International Multi-Conference on Systems, Signals and Devices, 2008: 1–5. https://ieeexplore.ieee.org/document/4632786/ -
Overview

Abstract: Computer visual travel aids (VTA) are effective means to assist the blind, while blind sidewalk recognition is an important function of VTA. The so-called blind sidewalk recognition is a method that segments blind sidewalk and detects boundary lines via image processing technology. After blind sidewalk recognition, VTA locate the boundary based on stereo vision and then guide the blind to sidewalk by control signal. In order to solve the problem that existing blind sidewalk recognition algorithms have bad real-time performance, a highly real-time blind sidewalk recognition algorithm based on boundary tracking is proposed, mainly including accurate recognition and tracking recognition. First, the preprocessing of shadow removal is performed for each frame image before recognition, which calculates a residual model based on the Retinex theory to detect shadow and uses regional color compensation to remove shadow. Next, accurate recognition step mainly calculates gray level co-occurrence matrix of the initial frame, and uses clustering and Hough transform to find the boundary lines of blind sidewalk in image. Then tracking recognition step takes over next frame. The location of blind sidewalk’s boundary in previous frame is used to predict the small-scale region of interest (ROI) of the boundary in current frame, and boundary lines in that region are extracted based on gray gradient feature. After that, the algorithm checks up the validity of tracking by estimating the consistency of color distribution on both sides of the boundary in previous and current frames: tracking is considered to be valid if the consistency is high, and tracking recognition step continues, otherwise accurate recognition step restarts. We apply our algorithm on binocular VTA and the blind wear the VTA to walk along blind sidewalk for the algorithm performance test. In many experiments, the time of accurate recognition and tracking recognition in each image frame under normal illumination are about 0.8 s and 0.1 s, respectively, and the average time of recognition per frame decreases significantly while the recognition rate of blind sidewalk is more than 90%. Meanwhile, the adaptability is good in shadow environment and is acceptable in other environment, including strong and weak light, damage of blink sidewalk, and blurring. Experimental results indicate that the algorithm can significantly enhance the real-time performance of blind sidewalk recognition in the premise of ensuring the recognition rate. Therefore, our algorithm is more suitable for real-time visual navigation than traditional ones.
-
Access History
Figures(10)
Tables(4)
Article Metrics


Export File
Citation
Tong Wei, Lei Yuan. Highly real-time blind sidewalk recognition algorithm based on boundary tracking[J]. Opto-Electronic Engineering, 2017, 44(7): 676-684. doi: 10.3969/j.issn.1003-501X.2017.07.003
Format
Content
 DownLoad:
DownLoad:

-
Figure 1.
Flow chart of the algorithm.
-
Figure 2.
Preprocessing results of shadow removal. (a) Original RGB image. (b) Shadow detection result. (c) Neighborhood non-shadow area. (d) Shadow removal image.
-
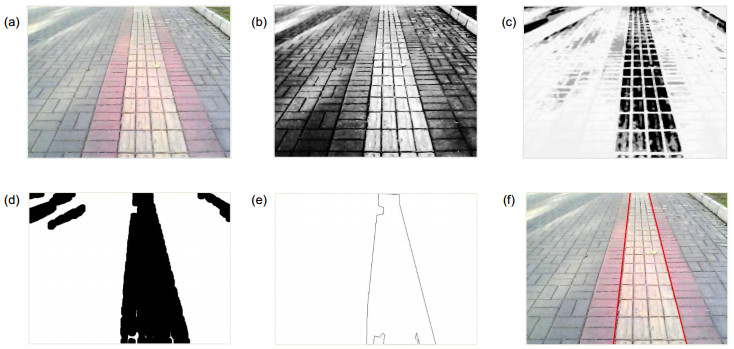
Figure 3.
Step processing results of accurate recognition of blind sidewalk. (a) RGB image. (b) Histogram equalization. (c) Feature extraction of blind sidewalk. (d) Feature clustering and segmentation of blind sidewalk. (e) Contour extraction of blind sidewalk region. (f) Boundary lines detection of blind sidewalk.
-
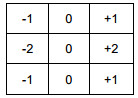
Figure 4.
Horizontal Sobel kernel.
-
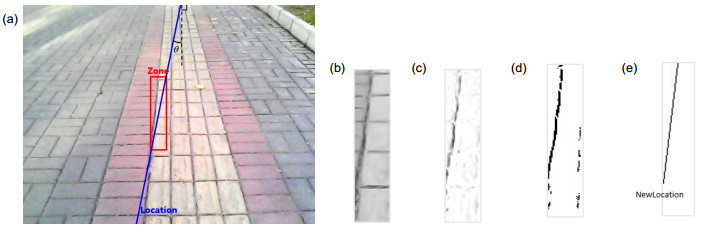
Figure 5.
Step processing results of boundary tracking in small-scale ROI. (a) Installation of small-scale ROI. (b) Grayscale image. (c) Gradient image. (d) Binary image. (e) Boundary line location.
-
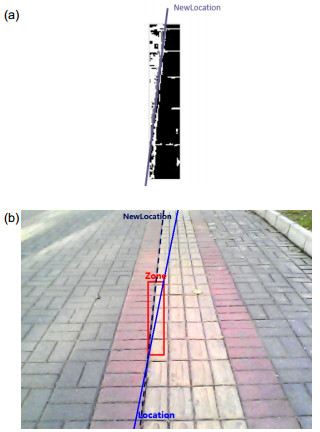
Figure 6.
Step processing results of tracking validity test. (a) Threshold based on color distribution in previous frame. (b) Boundary line location of valid tracking.
-
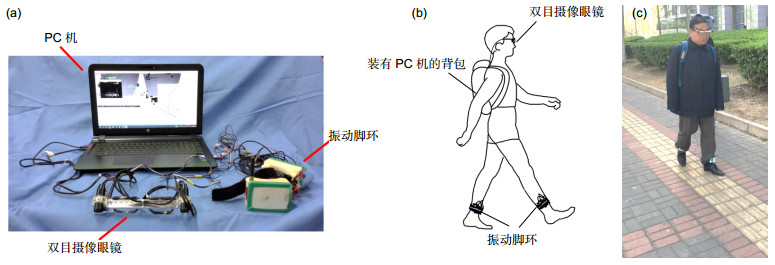
Figure 7.
Binocular VTA and experiment site. (a) The composition of binocular VTA. (b) Wearing diagram of VTA. (c) Experiment site.
-
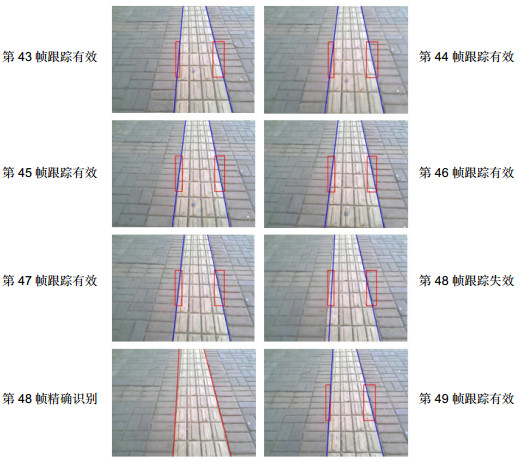
Figure 8.
Blind sidewalk recognition results in the experiment for several consecutive frames.
-
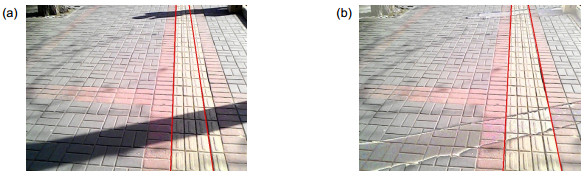
Figure 9.
Accurate recognition results before and after shadow removal.
-
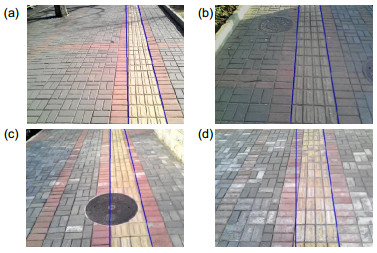
Figure 10.
Adaptability test scenarios and recognition results. (a) Intense light. (b) Weak light. (c) Defect. (d) Blur.


